| 번호 | 청구항 |
|---|---|
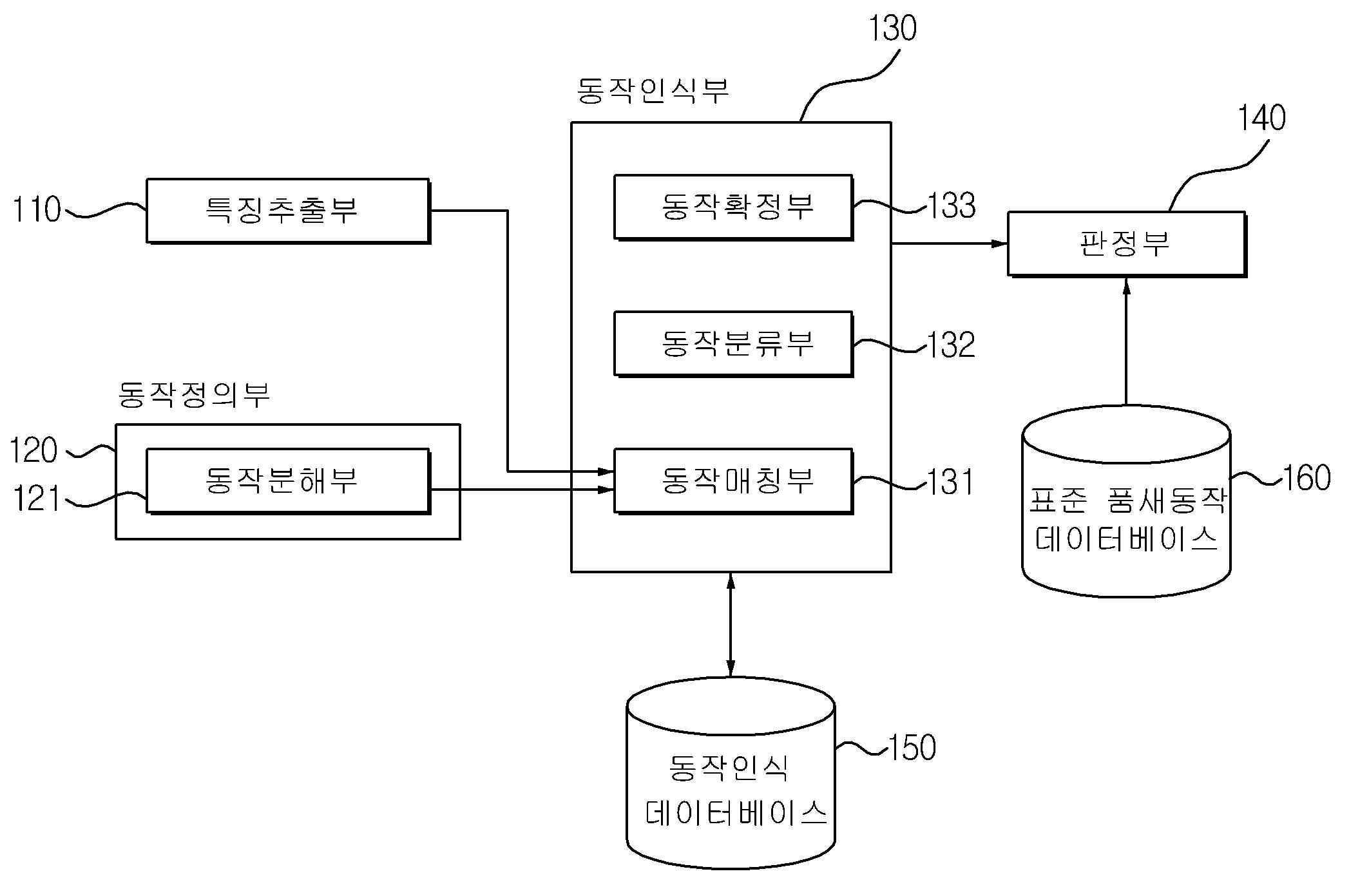
| 1 | 깊이 카메라를 이용한 인체골격 기반의 태권도 품새 인식 및 승단 심사 장치에 있어서,깊이 카메라로부터 입력된 오브젝트의 특징을 추출하는 특징 추출부;상기 오브젝트의 동작들을 정의하기 위한 동작 정의부;상기 특징 추출부와 상기 동작 정의부를 통해 얻어진 정보를 이용하여 상기 오브젝트의 행동을 인식하는 동작 인식부; 상기 동작 인식부에서 확정된 상기 오브젝트 동작의 시퀀스를 판정하여 승단 여부를 결정해주는 판정부를 포함하되,상기 동작 인식부는 상기 오브젝트의 동작을 분류하는 동작 분류부와, 동작을 매칭하는 동작 매칭부와, 상기 오브젝트의 동작을 확정하는 동작 확정부를 포함하고,상기 동작 인식부는 상기 오브젝트의 각 관절의 거리편차를 고려하여 동작을 인식하고, 상기 오브젝트의 동작은 서있는 동작과 누워있는 동작으로 나뉘어져있고, 상기 오브젝트의 동작을 구별하기 위해 척추와 x축 간의 각도를 이용하는 것을 특징으로 하는 태권도 품새 인식 및 승단 심사 장치. |
| 2 | 삭제 |
| 3 | 청구항 제1항에 있어서, 상기 동작 정의부는 동작 분해부를 더 포함하는 것을 특징으로 하는 태권도 품새 인식 및 승단 심사 장치. |
| 4 | 삭제 |
| 5 | 청구항 제1항에 있어서, 상기 동작인식부는 확정된 상기 동작들을 저장하는 사용자 동작인식 데이터베이스를 포함하는 것을 특징으로 하는 태권도 품새 인식 및 승단 심사 장치. |
| 6 | 청구항 제1항에 있어서, 상기 판정부는 표준 품새동작 데이터베이스를 더 포함하고, 상기 깊이 카메라로부터 좌표를 전달받아 미리 저장되어 있는 좌표 값과 비교하여 정확도를 측정하는 것을 특징으로 하는 태권도 품새 인식 및 승단 심사 장치. |
| 7 | 청구항 제6항에 있어서, 상기 정확도를 측정하는 것은 상기 동작의 시작점과 상기 동작이 끝나는 끝점 사이에 필요한 값들을 동적 시간 워프 알고리즘을 통해 정렬한 데이터를 이용해 구하고, 상기 좌표 값과 상기 정렬한 데이터를 이용해 정확도를 구하는 것을 특징으로 하는 태권도 품새 인식 및 승단 심사 장치. |
| 8 | 청구항 제7항에 있어서, 상기 좌표값은 상기 오브젝트의 x, y, z 축의 좌표값인 것을 특징으로 하는 태권도 품새 인식 및 승단 심사 장치. |
| 9 | 깊이 카메라를 이용한 인체골격 기반의 태권도 품새 인식 및 승단 심사방법에 있어서,깊이 카메라로부터 입력된 오브젝트의 특징을 추출하는 특징 추출단계;상기 오브젝트의 동작들을 정의하기 위한 동작 정의단계;상기 특징 추출단계와 상기 동작 정의단계를 통해 얻어진 정보를 이용하여 상기 오브젝트의 행동을 인식하는 동작 인식 단계;상기 동작 인식 단계에서 확정된 상기 오브젝트 동작의 시퀀스를 판정하여 승단 여부를 결정해주는 판정단계를 포함하되, 상기 동작 인식단계는 상기 오브젝트의 동작을 분류하는 동작 분류단계와, 동작을 매칭하는 동작 매칭단계와, 상기 오브젝트의 동작을 확정하는 동작 확정단계;를 포함하고,상기 동작 인식단계는 상기 오브젝트의 각 관절의 거리편차를 고려하여 동작을 인식하고, 상기 오브젝트의 동작은 서있는 동작과 누워있는 동작으로 나뉘어져있고, 상기 오브젝트의 동작을 구별하기 위해 척추와 x축 간의 각도를 이용하는 것을 특징으로 하는 태권도 품새 인식 및 승단 심사방법. |
| 10 | 삭제 |
| 11 | 청구항 제9항에 있어서, 상기 동작 정의단계는 동작 분해단계를 더 포함하는 것을 특징으로 하는 태권도 품새 인식 및 승단 심사방법. |
| 12 | 청구항 제11항에 있어서, 상기 동작 인식단계는 상기 오브젝트의 동작을 분류하는 동작 분류단계, 동작을 매칭하는 동작 매칭단계와 상기 오브젝트의 동작을 확정하는 동작 확정단계를 포함하는 것을 특징으로 하는 태권도 품새 인식 및 승단 심사방법. |
| 13 | 청구항 제9항에 있어서, 상기 동작 인식단계는 확정된 상기 동작들을 저장하는 사용자 동작인식 데이터베이스를 포함하는 것을 특징으로 하는 태권도 품새 인식 및 승단 심사방법. |
| 14 | 청구항 제13항에 있어서, 상기 판정단계는 표준 품새동작 데이터베이스를 더 포함하고, 상기 깊이 카메라로부터 좌표를 전달받아 미리 저장되어 있는 좌표 값과 비교하여 정확도를 측정 단계, 태권도 품새의 연속된 시퀀스를 비교해서 판단하는 단계, 합격 기준의 충족여부를 판단해 통보하는 단계를 더 포함하는 것을 특징으로 하는 태권도 품새 인식 및 승단 심사방법. |
| 15 | 청구항 제14항에 있어서, 상기 정확도를 측정하는 단계는 상기 동작의 시작점과 상기 동작이 끝나는 끝점 사이에 필요한 값들을 동적 시간 워프 알고리즘을 통해 정렬한 데이터를 이용해 구하고, 상기 좌표 값과 상기 정렬한 데이터를 이용해 정확도를 구하는 것을 특징으로 하는 태권도 품새 인식 및 승단 심사 방법. |
| 16 | 청구항 제15항에 있어서, 상기 좌표 값은 상기 오브젝트의 x, y, z 축의 좌표 값인 것을 특징으로 하는 태권도 품새 인식 및 승단 심사방법. |
| 17 | 청구항 제16항에 있어서, 상기 합격 기준은 상기 동작의 정확도가 60% ~ 100% 인 것을 특징으로 하는 태권도 품새 인식 및 승단 심사방법. |