| 번호 | 청구항 |
|---|---|
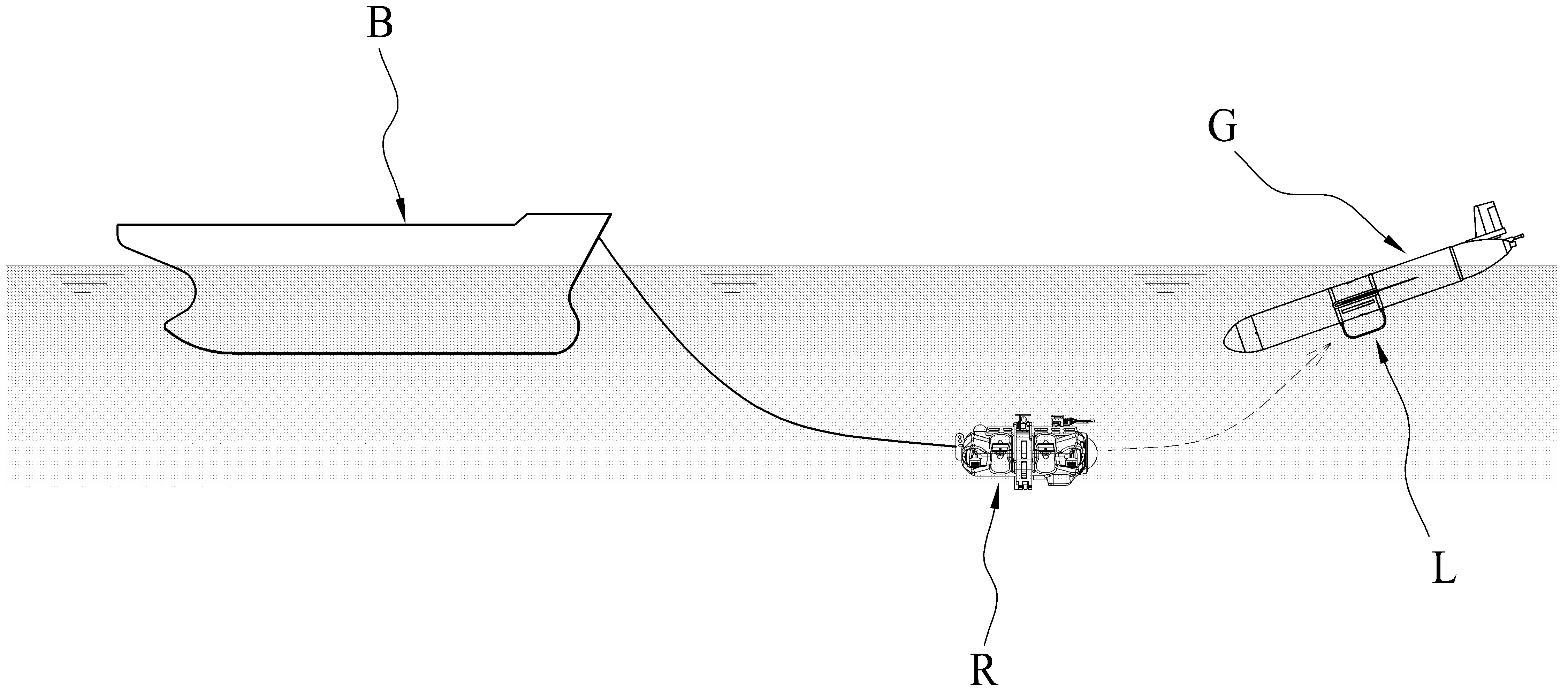
| 1 | 수중을 탐사하는 수중글라이더를 회수하도록 수중로봇을 이용하여 상기 수중글라이더를 회수하기 위한 수중무인탐사기를 이용한 수중글라이더 회수 방법으로서,상기 수중글라이더의 위치를 파악하고, 상기 수중글라이더에 접근하는 접근단계;상기 수중글라이더에 형성되는 회수고리를 통해 상기 수중글라이더와 거리를 조절하도록 상기 수중로봇을 조절하는 조절단계;상기 수중로봇에 형성되는 제1 그리퍼유닛 및 제2 그리퍼유닛을 통해 상기 수중글라이더를 고정시키는 고정단계; 및상기 고정단계를 통해 상기 수중글라이더를 고정시킨 상태에서 상기 수중글라이더를 회수하도록 상기 수중글라이더를 인양하는 선박으로 이동시키는 운송단계를 포함하되,상기 운송단계는,상기 수중로봇이 수중으로 주행되는 경우, 상기 수중글라이더의 길이방향 중심부를 기준으로 후면부의 부력에 의해 상기 후면부가 상기 수중글라이더의 길이방향 중심부를 기준으로 전면부보다 들리는 것을 방지하도록, 상기 수중로봇이 해수면과 인접한 위치에서 주행하는 것을 특징으로 하는,수중무인탐사기를 이용한 수중글라이더 회수 방법. |
| 2 | 제1항에 있어서,상기 접근단계는,상기 수중로봇이 상기 수중글라이더의 위치를 파악하도록 상기 수중글라이더의 후면부에 형성되는 수신부를 통해 신호를 전달받는 수신과정을 포함하는 것을 특징으로 하는,수중무인탐사기를 이용한 수중글라이더 회수 방법. |
| 3 | 제1항에 있어서,상기 접근단계는,상기 수중로봇에는 거리판단부가 구비되어 상기 수중로봇과 상기 수중글라이더 사이의 거리가 제1 거리 이내라고 판단되는 경우에 상기 조절단계를 수행하도록 주행속도를 조절하는 것을 특징으로 하는,수중무인탐사기를 이용한 수중글라이더 회수 방법. |
| 4 | 제1항에 있어서,상기 조절단계는,상기 수중로봇에 형성되는 상기 제1 그리퍼유닛이 상기 수중글라이더 하부에 형성되는 상기 회수고리를 파지하기 위해 상기 수중글라이더 보다 상대적으로 하부에 위치되도록 수중으로 이동하는 잠수과정; 및상기 제1 그리퍼유닛이 상기 회수고리를 파지하도록 상기 수중글라이더와 제2 거리만큼 근접하도록 이동하는 근접과정을 포함하는 것을 특징으로 하는,수중무인탐사기를 이용한 수중글라이더 회수 방법. |
| 5 | 제4항에 있어서,상기 근접과정은,상기 수중로봇의 상부와 상기 수중글라이더의 하부 사이의 거리를 제2 거리만큼 근접하도록 이동시키는 것을 특징으로 하는,수중무인탐사기를 이용한 수중글라이더 회수 방법. |
| 6 | 제1항에 있어서,상기 고정단계는,상기 제1 그리퍼유닛을 통해 상기 회수고리를 파지하여 상기 수중글라이더와 상기 수중로봇의 거리가 멀어지는 것을 방지하는 제1 그립과정; 및상기 제1 그립과정을 통해 상기 회수고리를 상기 제1 그리퍼유닛으로 파지한 상태에서 상기 수중글라이더의 몸체를 상기 제2 그리퍼유닛을 통해 고정시키는 제2 그립과정을 포함하는 것을 특징으로 하는,수중무인탐사기를 이용한 수중글라이더 회수 방법. |
| 7 | 제6항에 있어서,상기 제1 그립과정은,상기 제1 그리퍼유닛 내측에 마련되는 측정부를 통해 상기 회수고리와 상기 측정부가 접촉되면서 상기 회수고리의 위치를 파악하는 것을 특징으로 하는,수중무인탐사기를 이용한 수중글라이더 회수 방법. |
| 8 | 제7항에 있어서,상기 제1 그립과정은,상기 회수고리와 상기 측정부가 해수면의 유동에 의해 접촉과 비접촉 상태를 반복하는 경우, 상기 수중로봇을 상기 수중글라이더에서 기 설정된 거리만큼 이격시켜 상기 수중로봇과 상기 수중글라이더의 간격을 재조정하는 회래과정을 수행하는 것을 특징으로 하는,수중무인탐사기를 이용한 수중글라이더 회수 방법. |
| 9 | 제6항에 있어서,상기 제2 그립과정은,상기 수중글라이더의 길이방향을 기준으로 상기 수중글라이더에 형성되는 날개부보다 상대적으로 상기 제2 그리퍼유닛이 전면부에 위치하도록 하여 상기 수중글라이더의 전면부를 파지하는 것을 특징으로 하는,수중무인탐사기를 이용한 수중글라이더 회수 방법. |
| 10 | 삭제 |
| 11 | 제1항에 있어서,상기 운송단계는,해수면의 파랑에 의해 해수면과 인접한 위치의 주행이 어렵다고 판단되는 경우, 상기 수중로봇이 해수면의 파랑에 의한 제한을 방지하도록 수중으로 이동하는 것을 특징으로 하는,수중무인탐사기를 이용한 수중글라이더 회수 방법. |
| 12 | 제1항에 있어서,상기 수중로봇은,무선통신을 통해 제어되는 것을 특징으로 하는,수중무인탐사기를 이용한 수중글라이더 회수 방법. |