| 번호 | 청구항 |
|---|---|
| 9 | 제8 항에 있어서,상기 풀리 커넥티드 레이어는,상기 벡터 및 상기 실시간 환경 변수를 입력값으로 하여 상기 소음 예측 결과를 출력하는 소음 예측 장치. |
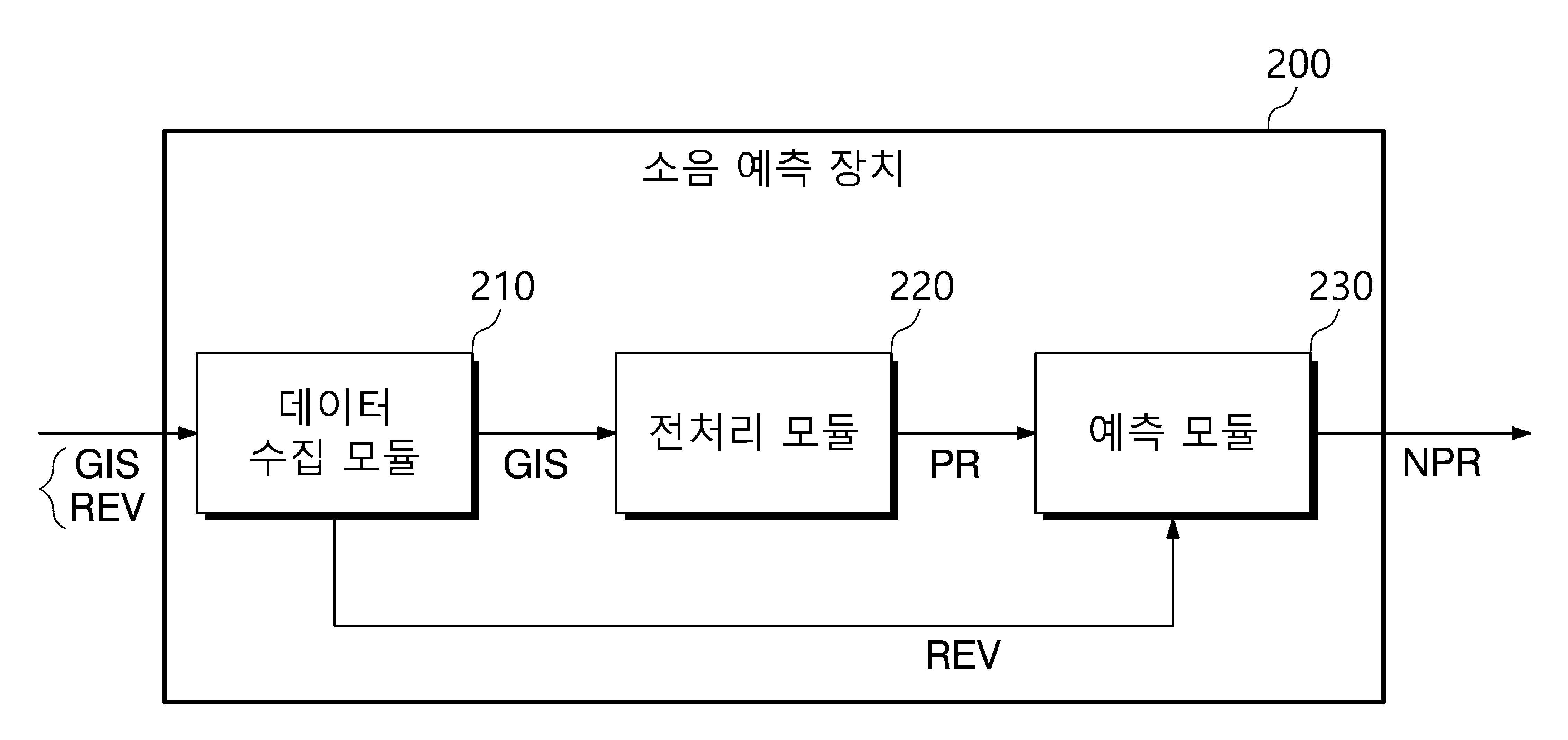
| 1 | GIS(Geographic Information System) 데이터를 수신하는 데이터 수집 모듈;상기 수신된 GIS 데이터를 전처리하여 전처리 결과를 생성하는 전처리 모듈; 및상기 전처리 결과 및 미리 학습된 뉴럴 네트워크(Neural Network)에 기초하여 소음 예측 결과를 생성하는 예측 모듈을 포함하되,상기 GIS 데이터는, 미리 정의된 특정 위치에 존재하는 건물, 도로 및 방음벽 중 적어도 하나의 위치에 관련한 지형지물 정보, 상기 지형지물의 고도에 관련한 고도 정보 및 상기 도로에 존재하는 차량에 관련한 교통 정보 중 적어도 하나를 포함하는소음 예측 장치. |
| 2 | 제1 항에 있어서,상기 전처리 모듈은,상기 GIS 데이터에 포함된 상기 지형지물 정보, 상기 고도 정보 및 상기 교통 정보를 조합하여 레스터 이미지(Raster Image)를 생성하고,생성된 상기 레스터 이미지에 기초하여 상기 전처리 결과를 생성하는소음 예측 장치. |
| 3 | 제2 항에 있어서,상기 전처리 모듈은,상기 레스터 이미지에서의 중심점으로부터 미리 정의된 거리만큼의 영역을 중심 영역으로 결정하고,상기 중심 영역에 대한 확대 이미지를 생성하고,상기 레스터 이미지 및 상기 확대 이미지를 상기 전처리 결과로써 결정하는소음 예측 장치. |
| 4 | 제3 항에 있어서,상기 예측 모듈은, 상기 중심점에서의 소음 예측치를 상기 소음 예측 결과로써 생성하는 소음 예측 장치. |
| 5 | 제4 항에 있어서,상기 예측 모듈은,상기 전처리 결과가 입력되면 상기 소음 예측 결과를 출력하도록 CNN(Convolutional Neural Network) 구조에 기초하여 미리 학습되는소음 예측 장치. |
| 6 | 제5 항에 있어서,상기 예측 모듈은,필터(Filter)를 통해 상기 전처리 결과로부터 특징 맵(Feature Map)을 추출하는 컨볼루션 블록(Convolution Block)과,상기 특징 맵을 벡터로 변환하는 풀링 레이어(Pooling Layer)와,상기 벡터에 기초하여 상기 소음 예측 결과를 출력하는 풀리 커넥티드 레이어(Fully Connected Layer)를 포함하는소음 예측 장치. |
| 7 | 제6 항에 있어서,상기 데이터 수집 모듈은,상기 특정 위치의 날씨와 관련한 실시간 환경 변수를 더 수신하는 소음 예측 장치. |
| 8 | 제7 항에 있어서,상기 실시간 환경 변수는,상기 특정 위치에 대한 기온 정보, 습도 정보, 구름 정보, 안개 정보 및 풍량 정보 중 적어도 하나를 포함하는 테이블 데이터 형태인소음 예측 장치. |
| 10 | 소음 예측 장치에 의해 수행되는 소음 예측 방법에 있어서,GIS 데이터를 수신하는 단계;상기 수신된 GIS 데이터를 전처리하여 전처리 결과를 생성하는 단계; 및상기 전처리 결과 및 미리 학습된 뉴럴 네트워크에 기초하여 소음 예측 결과를 생성하는 단계를 포함하되,상기 GIS 데이터는, 미리 정의된 특정 위치에 존재하는 건물, 도로 및 방음벽 중 적어도 하나의 위치에 관련한 지형지물 정보, 상기 지형지물의 고도에 관련한 고도 정보 및 상기 도로에 존재하는 차량에 관련한 교통 정보 중 적어도 하나를 포함하는소음 예측 방법. |