| 번호 | 청구항 |
|---|---|
| 1 | (a) 제1영상 및 제2영상을 포함하는 스테레오 영상을 획득하는 단계;(b) 상기 스테레오 영상의 뎁스 맵(Depth map)을 추출하기 위한 파라미터 값을 결정하는 단계; 및(c) 상기 결정된 파라미터 값에 기초하여 블록 매칭 알고리즘을 수행하여 상기 스테레오 영상의 뎁스 맵을 추출하는 단계,를 포함하고,상기 (b) 단계에서는, 상기 스테레오 영상의 뎁스 맵을 추출하기 위한 파라미터 값이 샘플 영상에 대하여 기설정된 파라미터 값에 기초한 신경망 학습(Neural Network Training)을 통해 결정되고,상기 (b) 단계에서, 상기 스테레오 영상의 뎁스 맵을 추출하기 위한 파라미터 값은, 상기 샘플 영상에 블록 매칭을 수행하기 위한 초기 파라미터 값, 상기 초기 파라미터 값에 기초하여 산출된 상기 샘플 영상의 뎁스 맵 및 상기 샘플 영상의 실측 영상을 입력값으로 하고, 상기 샘플 영상의 뎁스 맵과 상기 샘플 영상의 실측 영상의 에러율, 전력 소모량 및 프레임률을 출력값으로 하는 상기 신경망 학습을 통해 결정되는 것인, 스테레오 영상 처리 방법. |
| 2 | 삭제 |
| 3 | 삭제 |
| 4 | 제1항에 있어서,상기 초기 파라미터 값은 상기 샘플 영상의 폭, 상기 샘플 영상의 높이, 상기 샘플 영상에 대한 블록 매칭시 블록의 폭, 상기 샘플 영상에 대한 블록 매칭시 블록의 높이 및 탐색 범위 중 적어도 하나를 포함하는 것인, 스테레오 영상 처리 방법. |
| 5 | 제1항에 있어서,상기 (b) 단계에서는,상기 신경망 학습의 수행시 역전파 알고리즘에 기초하여 상기 입력값에 대응하는 가중치를 조정하는 것인, 스테레오 영상 처리 방법. |
| 6 | 제5항에 있어서,상기 (b) 단계에서는,상기 역전파 알고리즘 수행 시 기정의된 비용 함수에 기초하여 상기 출력값에 대한 비용을 계산하되,경사 하강법을 통해 상기 계산된 비용이 최소가 되도록 상기 가중치를 조정하는 것인, 스테레오 영상 처리 방법. |
| 7 | 제6항에 있어서,상기 (b) 단계에서는,상기 에러율 및 상기 프레임률 각각이 기설정된 조건을 충족하는지 여부를 고려하여 상기 계산된 비용이 최소가 되도록 상기 가중치를 조정하는 것인, 스테레오 영상 처리 방법. |
| 8 | 제7항에 있어서,상기 (b) 단계에서는, 상기 에러율이 25.27% 미만이고 상기 프레임률이 30 FPS 이상인 조건을 충족할 때의 최소 전력 소모량을 상기 비용으로 계산하는 것인, 스테레오 영상 처리 방법. |
| 9 | 제1항에 있어서,상기 스테레오 영상은 무인기를 통해 획득된 것인, 스테레오 영상 처리 방법. |
| 10 | (a) 샘플 영상에 대한 데이터베이스를 구축하는 단계;(b) 상기 데이터베이스를 기반으로 하여, 상기 샘플 영상에 대하여 기설정된 파라미터 값을 이용해 신경망 학습(Neural Network Training)을 수행하는 단계; 및(c) 상기 신경망 학습에 기초하여, 획득한 스테레오 영상의 뎁스 맵(Depth map)을 추출하기 위한 블록 매칭 알고리즘의 파라미터 값을 결정하는 단계,를 포함하고,상기 (b) 단계에서는,상기 데이터베이스를 기반으로 하여, 상기 샘플 영상에 블록 매칭을 수행하기 위한 초기 파라미터 값, 상기 초기 파라미터 값에 기초하여 산출된 상기 샘플 영상의 뎁스 맵 및 상기 샘플 영상의 실측 영상을 입력값으로 하고, 상기 샘플 영상의 뎁스 맵과 상기 샘플 영상의 실측 영상의 에러율, 전력 소모량 및 프레임률을 출력값으로 하여 상기 신경망 학습을 수행하는 것인, 스테레오 영상의 뎁스 맵 추출을 위한 파라미터 값 결정 방법. |
| 11 | 삭제 |
| 12 | 제10항에 있어서,상기 초기 파라미터 값은 상기 샘플 영상의 폭, 상기 샘플 영상의 높이, 상기 샘플 영상에 대한 블록 매칭시 블록의 폭, 상기 샘플 영상에 대한 블록 매칭시 블록의 높이 및 탐색 범위 중 적어도 하나를 포함하는 것인, 스테레오 영상의 뎁스 맵 추출을 위한 파라미터 값 결정 방법. |
| 13 | 제10항에 있어서,상기 (b) 단계에서는,상기 신경망 학습의 수행시 역전파 알고리즘에 기초하여 상기 입력값에 대응하는 가중치를 조정하고,상기 (c) 단계에서는,상기 조정된 가중치를 고려하여 상기 획득한 스테레오 영상의 뎁스 맵을 추출하기 위한 블록 매칭 알고리즘의 파라미터 값을 결정하는 것인, 스테레오 영상의 뎁스 맵 추출을 위한 파라미터 값 결정 방법. |
| 14 | 제13항에 있어서,상기 (b) 단계에서는,상기 역전파 알고리즘 수행 시 기정의된 비용 함수에 기초하여 상기 출력값에 대한 비용을 계산하되,경사 하강법을 통해 상기 계산된 비용이 최소가 되도록 상기 가중치를 조정하는 것인, 스테레오 영상의 뎁스 맵 추출을 위한 파라미터 값 결정 방법. |
| 15 | 제14항에 있어서,상기 (b) 단계에서는,상기 에러율 및 상기 프레임률 각각이 기설정된 조건을 충족하는지 여부를 고려하여 상기 계산된 비용이 최소가 되도록 상기 가중치를 조정하는 것인, 스테레오 영상의 뎁스 맵 추출을 위한 파라미터 값 결정 방법. |
| 16 | 제15항에 있어서,상기 (b) 단계에서는, 상기 에러율이 25.27% 미만이고 상기 프레임률이 30 FPS 이상인 조건을 충족할 때의 최소 전력 소모량을 상기 비용으로 계산하는 것인, 스테레오 영상의 뎁스 맵 추출을 위한 파라미터 값 결정 방법. |
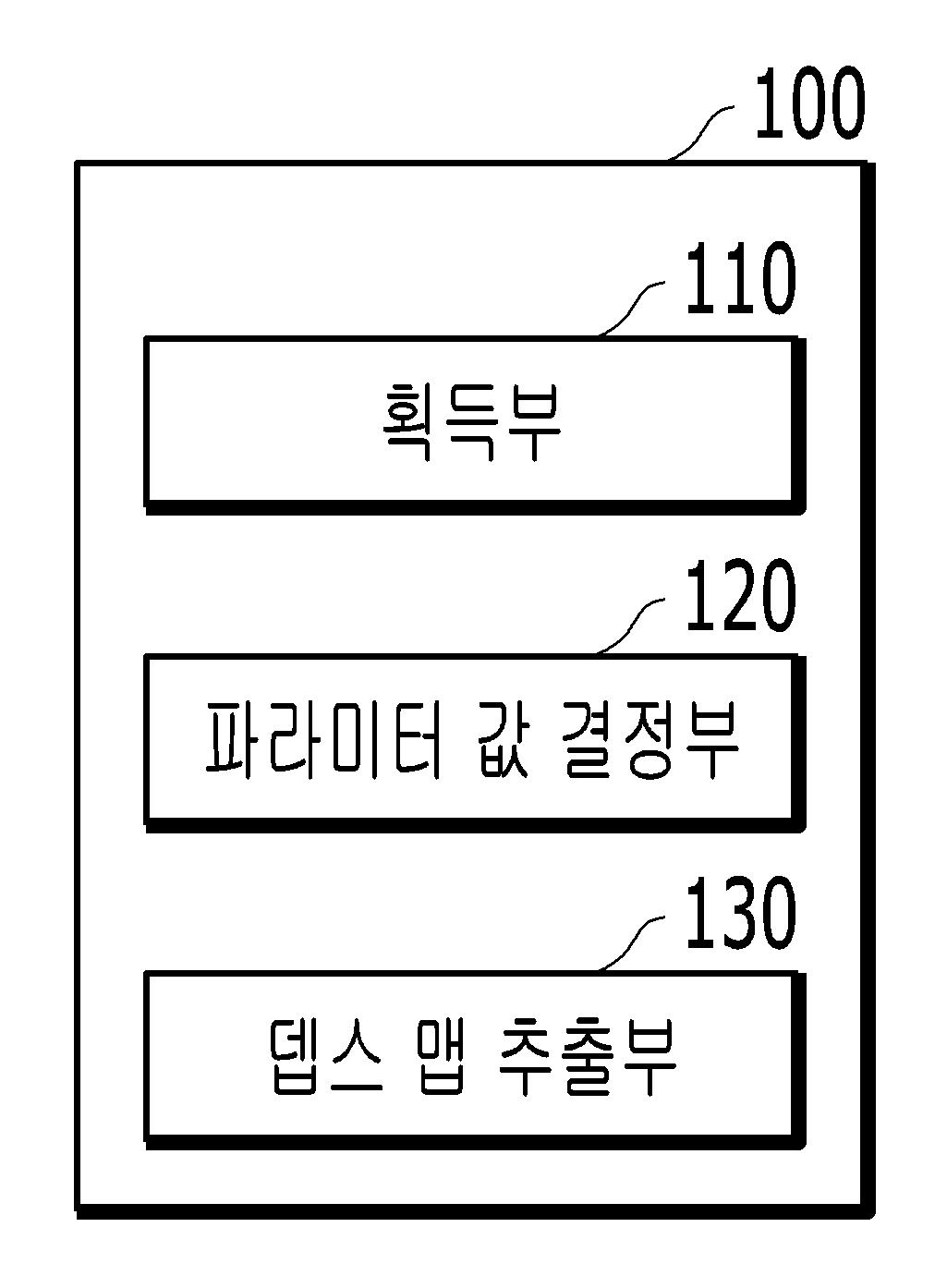
| 17 | 제1영상 및 제2영상을 포함하는 스테레오 영상을 획득하는 획득부;상기 스테레오 영상의 뎁스 맵(Depth map)을 추출하기 위한 파라미터 값을 결정하는 파라미터 값 결정부; 및상기 결정된 파라미터 값에 기초하여 블록 매칭 알고리즘을 수행하여 상기 스테레오 영상의 뎁스 맵을 추출하는 뎁스 맵 추출부,를 포함하고,상기 파라미터 값 결정부는,상기 스테레오 영상의 뎁스 맵을 추출하기 위한 파라미터 값을 샘플 영상에 대하여 기설정된 파라미터 값에 기초한 신경망 학습(Neural Network Training)을 통해 결정하되,상기 스테레오 영상의 뎁스 맵을 추출하기 위한 파라미터 값은, 상기 샘플 영상에 블록 매칭을 수행하기 위한 초기 파라미터 값, 상기 초기 파라미터 값에 기초하여 산출된 상기 샘플 영상의 뎁스 맵 및 상기 샘플 영상의 실측 영상을 입력값으로 하고, 상기 샘플 영상의 뎁스 맵과 상기 샘플 영상의 실측 영상의 에러율, 전력 소모량 및 프레임률을 출력값으로 하는 상기 신경망 학습을 통해 결정되는 것인, 스테레오 영상 처리 장치. |
| 18 | 제17항에 있어서,상기 파라미터 값 결정부는,상기 신경망 학습 수행시 역전파 알고리즘에 기초하여 상기 신경망 학습의 입력값에 대응하는 가중치를 조정하는 것인, 스테레오 영상 처리 장치. |
| 19 | 제18항에 있어서,상기 파라미터 값 결정부는,상기 역전파 알고리즘 수행 시 기정의된 비용 함수에 기초하여 상기 신경망 학습의 출력값에 대한 비용을 계산하되,경사 하강법을 통해 상기 계산된 비용이 최소가 되도록 상기 가중치를 조정하는 것인, 스테레오 영상 처리 장치. |