| 번호 | 청구항 |
|---|---|
| 1 | 프로세서에 의해 수행되는 터널 내 감시 카메라(surveillance camera)를 활용하여 실시간으로 차량의 번호판을 인식하고 차선 변경하는 차량을 감지하기 위한 방법에 있어서,상기 터널에 설치된 상기 감시 카메라로부터 수신된 감시 영상(surveillance image)을 렌즈 플레어(lens flare) 개선 동작, 광학적 왜곡 해결 동작 및 블러(blur) 현상 개선 동작 중 적어도 하나를 이용하여 전처리하는 단계;제1 머신러닝 기반 모델을 이용하여 상기 전처리된 영상에서 차량을 인식하는 단계;제2 머신러닝 기반 모델을 이용하여 상기 인식된 차량의 번호판을 인식하는 단계;제3 머신러닝 기반 모델을 이용하여 상기 인식된 차량을 추적하는 단계;제4 머신러닝 기반 모델을 이용하여 상기 인식된 차량을 포함하는 영상 프레임의 차선을 인식하는 단계; 및제5 머신러닝 기반 모델을 이용하여 상기 인식된 차량의 차선 위반여부를 판단하는 단계를 포함하는 방법. |
| 2 | 제1항에 있어서,상기 렌즈 플레어 개선 동작은,상기 감시 영상의 각 프레임을 제1 GAN(Generative Adversarial Network) 모델에 입력하여 상기 감시 영상보다 높은 해상도를 가지는 렌즈 플레어 개선 영상을 출력하는,방법. |
| 3 | 제1항에 있어서,상기 광학적 왜곡 해결 동작은,상기 감시 영상의 각 프레임을 제2 GAN(Generative Adversarial Network) 모델에 입력하여 먼지로 인한 왜곡된 부분이 복원된 광학적 왜곡 해결 영상을 출력하는,방법. |
| 4 | 제1항에 있어서,상기 블러 현상 개선 동작은,상기 감시 영상의 각 프레임을 CNN(Convolutional Neural Network) 모델에 입력하여 상기 감시 영상보다 높은 선명도를 가지는 블러 현상 개선 영상을 출력하는,방법. |
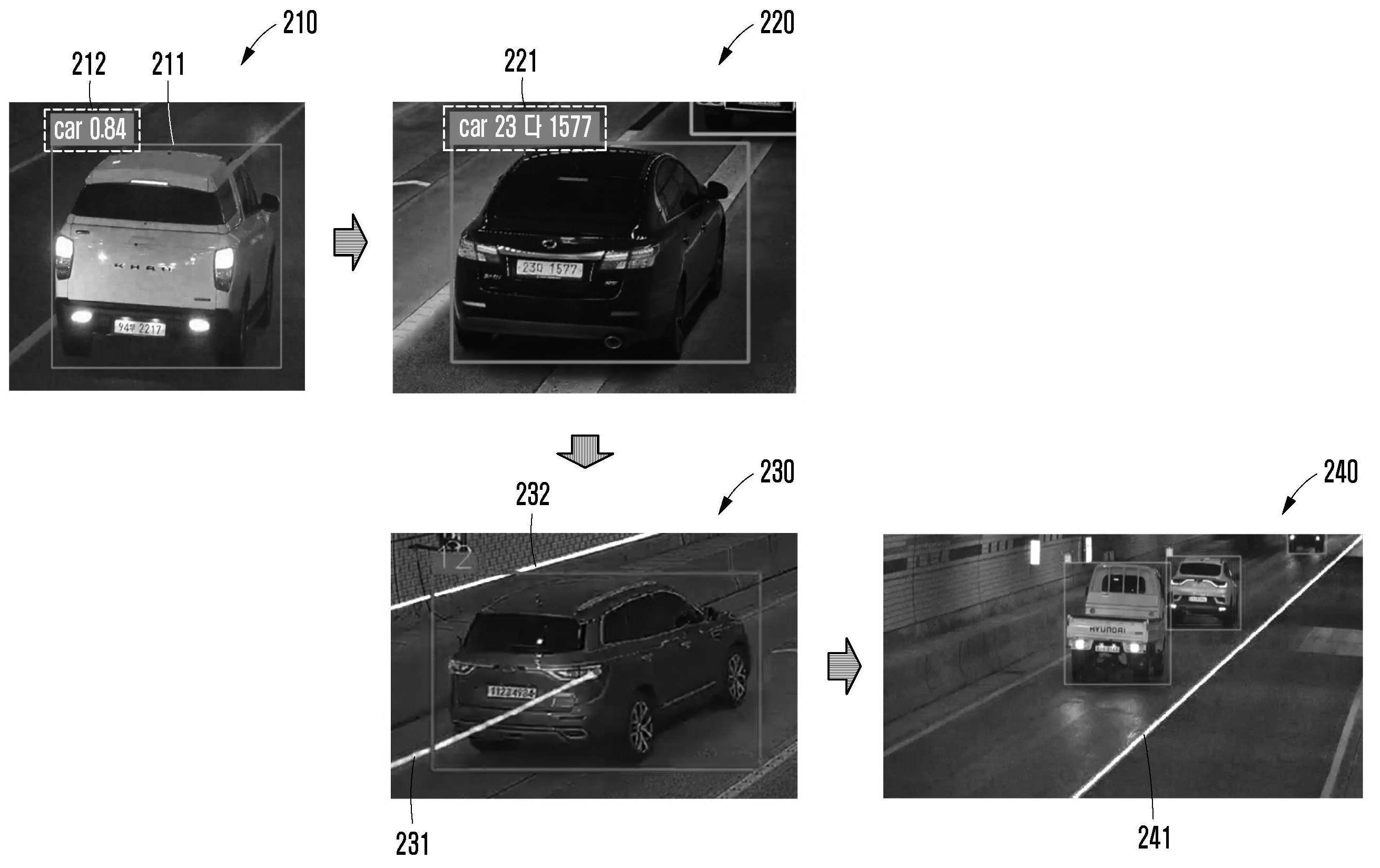
| 5 | 제1항에 있어서,상기 전처리된 영상에서 차량을 인식하는 단계는,Yolo 기반의 상기 제1 머신러닝 기반 모델을 이용하여 상기 전처리된 영상에 차량을 나타내는 바운딩 박스(Bounding Box)를 표시하는 단계를 포함하는 방법. |
| 6 | 제5항에 있어서,상기 인식된 차량의 번호판을 인식하는 단계는,OCR 모델 기반의 상기 제2 머신러닝 기반 모델을 이용하여 상기 바운딩 박스 내에 있는 번호판의 글자와 숫자를 인식하는 단계;기 설정된 번호판 체계 규칙에 기초하여 상기 인식된 글자와 숫자에 대한 인식률을 산정하는 단계; 및상기 인식률이 기 설정된 기준 인식률 보다 크거나 같은 경우, 상기 인식된 글자와 숫자를 표시하는 단계를 포함하는 방법. |
| 7 | 제6항에 있어서,상기 인식률이 상기 기준 인식률 보다 작은 경우, 상기 바운딩 박스 내에 있는 번호판의 글자와 숫자를 재인식하는 단계; 및상기 재인식된 글자와 숫자에 대한 인식률을 재산정하여 상기 기준 인식률과 비교하는 단계를 더 포함하는 방법. |
| 8 | 제5항에 있어서,상기 인식된 차량을 추적하는 단계는,Sort 알고리즘 기반의 상기 제3 머신러닝 기반 모델을 이용하여 상기 바운딩 박스에 포함되는 차량의 이동을 선으로 표시하는 단계를 포함하는 방법. |
| 9 | 제1항에 있어서,상기 인식된 차량을 포함하는 영상 프레임의 차선을 인식하는 단계는,상기 영상 프레임의 터널 구간이 직선인 경우, 확률적 허프 변환(PHT, Probabilistic Hough Transform) 알고리즘 기반의 상기 제4 머신러닝 기반 모델을 이용하여 차선들 중 중앙선을 인식하는 단계 또는상기 영상 프레임의 터널 구간에 곡률이 있는 경우, 슬라이딩 윈도우(Sliding Window) 기법을 이용하여 차선들 중 중앙선을 인식하는 단계를 포함하는 방법. |
| 10 | 터널 내 감시 카메라(surveillance camera)를 활용하여 실시간으로 차량의 번호판을 인식하고 차선 변경하는 차량을 감지하기 위한 장치에 있어서,상기 터널에 설치된 상기 감시 카메라로부터 수신된 감시 영상(surveillance image)을 렌즈 플레어(lens flare) 개선 동작, 광학적 왜곡 해결 동작 및 블러(blur) 현상 개선 동작 중 적어도 하나를 이용하여 전처리하고, 제1 머신러닝 기반 모델을 이용하여 상기 전처리된 영상에서 차량을 인식하고, 제2 머신러닝 기반 모델을 이용하여 상기 인식된 차량의 번호판을 인식하고, 제3 머신러닝 기반 모델을 이용하여 상기 인식된 차량을 추적하고, 제4 머신러닝 기반 모델을 이용하여 상기 인식된 차량을 포함하는 영상 프레임의 차선을 인식하며, 제5 머신러닝 기반 모델을 이용하여 상기 인식된 차량의 차선 위반여부를 판단하는 프로세서를 포함하는 장치. |
| 11 | 제10항에 있어서,상기 렌즈 플레어 개선 동작은,상기 감시 영상의 각 프레임을 제1 GAN(Generative Adversarial Network) 모델에 입력하여 상기 감시 영상보다 높은 해상도를 가지는 렌즈 플레어 개선 영상을 출력하는,장치. |
| 12 | 제10항에 있어서,상기 광학적 왜곡 해결 동작은,상기 감시 영상의 각 프레임을 제2 GAN(Generative Adversarial Network) 모델에 입력하여 먼지로 인한 왜곡된 부분이 복원된 광학적 왜곡 해결 영상을 출력하는,장치. |
| 13 | 제10항에 있어서,상기 블러 현상 개선 동작은,상기 감시 영상의 각 프레임을 CNN(Convolutional Neural Network) 모델에 입력하여 상기 감시 영상보다 높은 선명도를 가지는 블러 현상 개선 영상을 출력하는,장치. |
| 14 | 제10항에 있어서,상기 프로세서는,상기 전처리된 영상에서 차량을 인식함에 있어서, Yolo 기반의 상기 제1 머신러닝 기반 모델을 이용하여 상기 전처리된 영상에 차량을 나타내는 바운딩 박스(Bounding Box)를 표시하는,장치. |
| 15 | 제14항에 있어서,상기 프로세서는,상기 인식된 차량의 번호판을 인식함에 있어서, OCR 모델 기반의 상기 제2 머신러닝 기반 모델을 이용하여 상기 바운딩 박스 내에 있는 번호판의 글자와 숫자를 인식하고, 기 설정된 번호판 체계 규칙에 기초하여 상기 인식된 글자와 숫자에 대한 인식률을 산정하며, 상기 인식률이 기 설정된 기준 인식률 보다 크거나 같은 경우, 상기 인식된 글자와 숫자를 표시하는,장치. |
| 16 | 제15항에 있어서,상기 프로세서는,상기 인식률이 상기 기준 인식률 보다 작은 경우, 상기 바운딩 박스 내에 있는 번호판의 글자와 숫자를 재인식하고, 상기 재인식된 글자와 숫자에 대한 인식률을 재산정하여 상기 기준 인식률과 비교하는,장치. |
| 17 | 제14항에 있어서,상기 프로세서는,상기 인식된 차량을 추적함에 있어서, Sort 알고리즘 기반의 상기 제3 머신러닝 기반 모델을 이용하여 상기 바운딩 박스에 포함되는 차량의 이동을 선으로 표시하는,장치. |
| 18 | 제10항에 있어서,상기 프로세서는,상기 인식된 차량을 포함하는 영상 프레임의 차선을 인식함에 있어서, 상기 영상 프레임의 터널 구간이 직선인 경우, 확률적 허프 변환(PHT, Probabilistic Hough Transform) 알고리즘 기반의 상기 제4 머신러닝 기반 모델을 이용하여 차선들 중 중앙선을 인식하거나,상기 영상 프레임의 터널 구간에 곡률이 있는 경우, 슬라이딩 윈도우(Sliding Window) 기법을 이용하여 차선들 중 중앙선을 인식하는,장치. |