| 번호 | 청구항 |
|---|---|
| 6 | 제 1 항에 있어서, 상기 깊이 추정 모델은, 이미지에 포함된 하나 이상의 오브젝트들의 깊이를 추정하기 위한 깊이 추정 서브모델 및 이미지에 기초하여 카메라의 자세를 추정하기 위한 자세 추정 서브모델을 포함하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 1 | 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램으로서, 상기 컴퓨터 프로그램은 하나 이상의 프로세서에서 실행되는 경우 이미지에서의 깊이 추정을 위한 이하의 방법들을 수행하도록 하며, 상기 방법은, 제 1 이미지 및 제 2 이미지를 획득하는 단계;상기 제 1 이미지를 상기 제 2 이미지의 깊이 정보에 기초하여 워핑한 제 12 워핑 이미지 및 상기 제 2 이미지를 상기 제 1 이미지의 깊이 정보에 기초하여 워핑한 제 21 워핑 이미지를 생성하는 단계; 및상기 제 2 이미지, 상기 제 12 워핑 이미지 및 상기 제 21 워핑 이미지에 적어도 부분적으로 기초하여 깊이 추정 모델을 학습시키는 단계;를 포함하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 2 | 제 1 항에 있어서, 상기 제 1 이미지 및 상기 제 2 이미지는 단안 카메라에서 서로 다른 시점에 촬영된 이미지인, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 3 | 제 1 항에 있어서, 상기 제 1 이미지 및 상기 제 2 이미지 중 적어도 하나는 반사면을 포함하는 오브젝트를 적어도 하나 포함하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 4 | 제 1 항에 있어서, 상기 제 12 워핑 이미지는, 상기 제 1 이미지를 기준으로 상기 제 2 이미지와의 차이(disparity)에 기초하여 상기 제 2 이미지의 깊이를 추정하고, 상기 제 2 이미지의 깊이에 기초하여 상기 제 1 이미지를 워핑한 이미지인, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
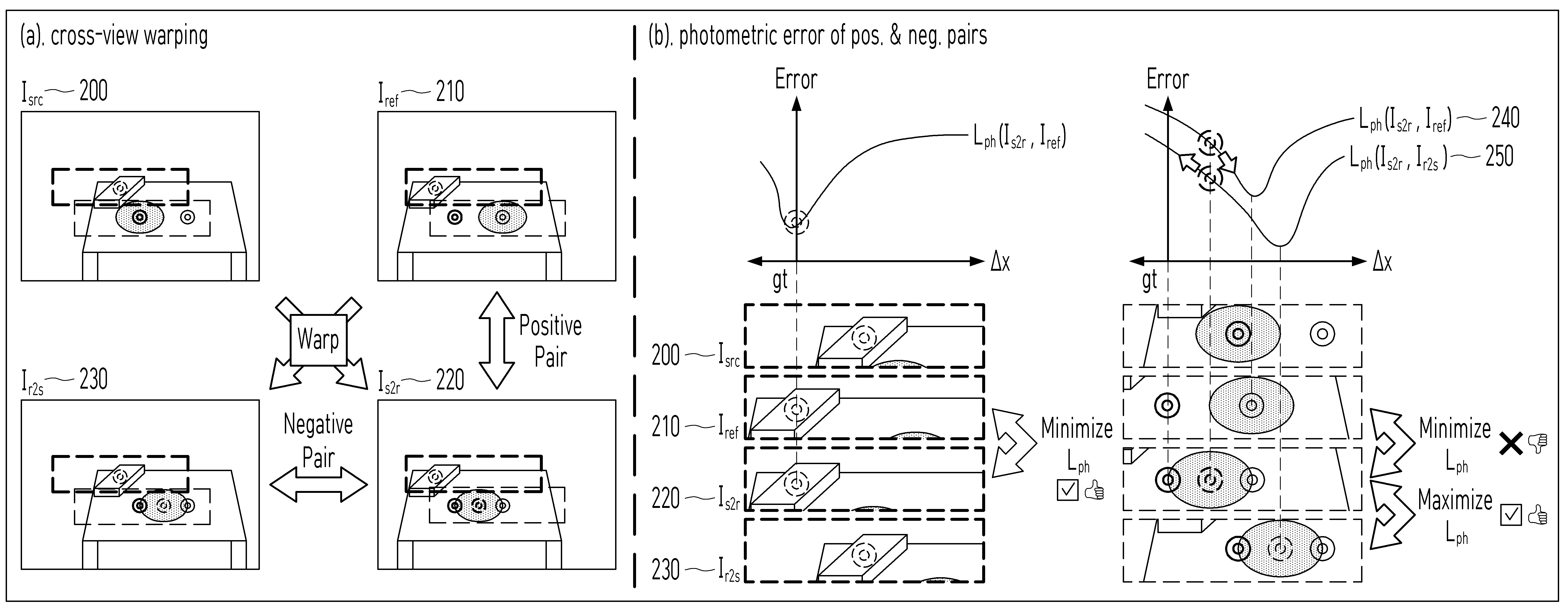
| 5 | 제 4 항에 있어서, 상기 제 12 워핑 이미지는, 아래 수학식 3 에 기초하여 생성되며,상기 제 21 워핑 이미지는, 아래 수학식 5 에 기초하여 생성되고,수학식 3: 수학식 5: 여기서, 는 제 1 이미지 를 제 2 이미지의 깊이 정보에 기초하여 워핑한 결과 이미지인 제 12 워핑 이미지이고, 는 제 2 이미지를 제 1 이미지의 깊이 정보에 기초하여 워핑한 결과 이미지인 제 21 워핑 이미지이고, K는 카메라의 내적 행렬, 는 제 2 이미지에서 제 1 이미지로의 카메라의 상대적인 자세로 회전 행렬 R과 변환 벡터 t로 구성되며, 는 제 2 이미지의 깊이 맵, 는 제 1 이미지의 깊이 맵인, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 7 | 제 1 항에 있어서, 상기 깊이 추정 모델은, 상기 제 12 워핑 이미지를 앵커 이미지(anchor image), 상기 제 2 이미지를 앵커 포지티브 이미지(anchor positive image) 상기 제 21 워핑 이미지를 앵커 네거티브 이미지(anchor negative image)로 하는 트리플렛 로스(triplet loss)에 기초하여 학습되는,컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 8 | 제 1 항에 있어서, 상기 깊이 추정 모델은, 상기 제 1 이미지 및 상기 제 2 이미지 중 적어도 하나에 포함된 하나 이상의 오브젝트들 중 반사면을 포함하는 오브젝트와 반사면을 포함하지 않는 오브젝트의 영역에 기초하여 상이한 손실함수(loss function)에 기초하여 학습되는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 9 | 제 8 항에 있어서, 상기 깊이 추정 모델은, 반사면을 포함하는 오브젝트의 영역에 대해서 트리플렛 로스에 기초하여 학습되는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 10 | 제 1 항에 있어서, 상기 제 1 이미지 및 제 2 이미지의 포토메트릭 에러에 기초하여 반사 표면을 식별하는 반사 영역 마스크를 생성하는 단계; 를 더 포함하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 11 | 제 10 항에 있어서, 상기 반사 영역 마스크는 수학식 7에 기초하여 정의되며, 수학식 7: 여기서, 는 이미지 좌표를 나타내며, 는 반사 영역과 비반사 영역을 구분하는데 필요한 광도 차이를 나타내는 마진이며, 는 동일한 시점의 이미지들 사이의 포토메트릭 에러를 나타내며, 그리고 는 서로 다른 시점의 이미지들 사이의 포토메트릭 에러를 나타내는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 12 | 제 7 항에 있어서, 상기 트리플렛 로스는 아래 수학식 8에 기초하여 정의되는, 수학식8: 여기서, 는 트리플렛 로스, 는 반사 영역 마스크, 는 힌지 손실 함수, 는 반사 영역이 아닌 영역을 나타내는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 13 | 제 12 항에 있어서, 상기 트리플렛 로스는, 반사 영역 마스크가 1 인 영역에 대해서, 를 죄소화 하고, 나머지 영역에 대해서 를 최소화하도록 하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 14 | 제 7 항에 있어서, 제 1 깊이 맵을 트리플렛 로스를 이용하여 학습된 상기 깊이 추정 모델을 이용하여 생성하고, 제 2 깊이 맵을 포토메트릭 로스를 이용하여 학습된 제 2 깊이 추정 모델을 이용하여 생성하고, 상기 제 1 깊이 맵 및 상기 제 2 깊이 맵을 통합하여 하나의 가상 깊이 맵을 생성하고, 상기 가상 깊이 맵에 기초하여 학생 깊이 추정 모델을 학습시키는 단계;를 더 포함하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 15 | 제 14 항에 있어서, 상기 가상 깊이 맵은 수학식 9에 의하여 정의되는, 수학식 9: 여기서, 는 트리플렛 로스를 이용하여 학습된 깊이 추정 모델의 제 1 깊이 맵이고, 는 포토메트릭 로스를 이용하여 학습된 제 2 깊이 추정 모델의 제 2 깊이 맵이며, 는 가상 깊이 맵인, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 16 | 제 15 항에 있어서, 상기 학생 깊이 추정 모델의 학습 손실 함수는 수학식 10 으로 정의되는, 수학식 10: 여기서, 는 학생 깊이 추정 모델의 학습 손실 함수이며, 는 학생 깊이 추정 모델에서 예측된 깊이 맵이며, 는 상기 가상 깊이 맵인, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 17 | 컴퓨터 장치의 하나 이상의 프로세서에서 실행가능한 이미지에서의 깊이 추정 방법으로서, 제 1 이미지 및 제 2 이미지를 획득하는 단계;상기 제 1 이미지를 상기 제 2 이미지의 깊이 정보에 기초하여 워핑한 제 12 워핑 이미지 및 상기 제 2 이미지를 상기 제 1 이미지의 깊이 정보에 기초하여 워핑한 제 21 워핑 이미지를 생성하는 단계; 및상기 제 2 이미지, 상기 제 12 워핑 이미지 및 상기 제 21 워핑 이미지에 적어도 부분적으로 기초하여 깊이 추정 모델을 학습시키는 단계:를 포함하는, 방법. |
| 18 | 컴퓨터 장치로서, 하나 이상의 프로세서; 및 상기 하나 이상의 프로세서에서 실행가능한 명령들을 저장하는 메모리;를 포함하며, 상기 하나 이상의 프로세서는, 제 1 이미지 및 제 2 이미지를 획득하고,상기 제 1 이미지를 상기 제 2 이미지의 깊이 정보에 기초하여 워핑한 제 12 워핑 이미지 및 상기 제 2 이미지를 상기 제 1 이미지의 깊이 정보에 기초하여 워핑한 제 21 워핑 이미지를 생성하고, 그리고상기 제 2 이미지, 상기 제 12 워핑 이미지 및 상기 제 21 워핑 이미지에 적어도 부분적으로 기초하여 깊이 추정 모델을 학습시키는,컴퓨터 장치. |