| 번호 | 청구항 |
|---|---|
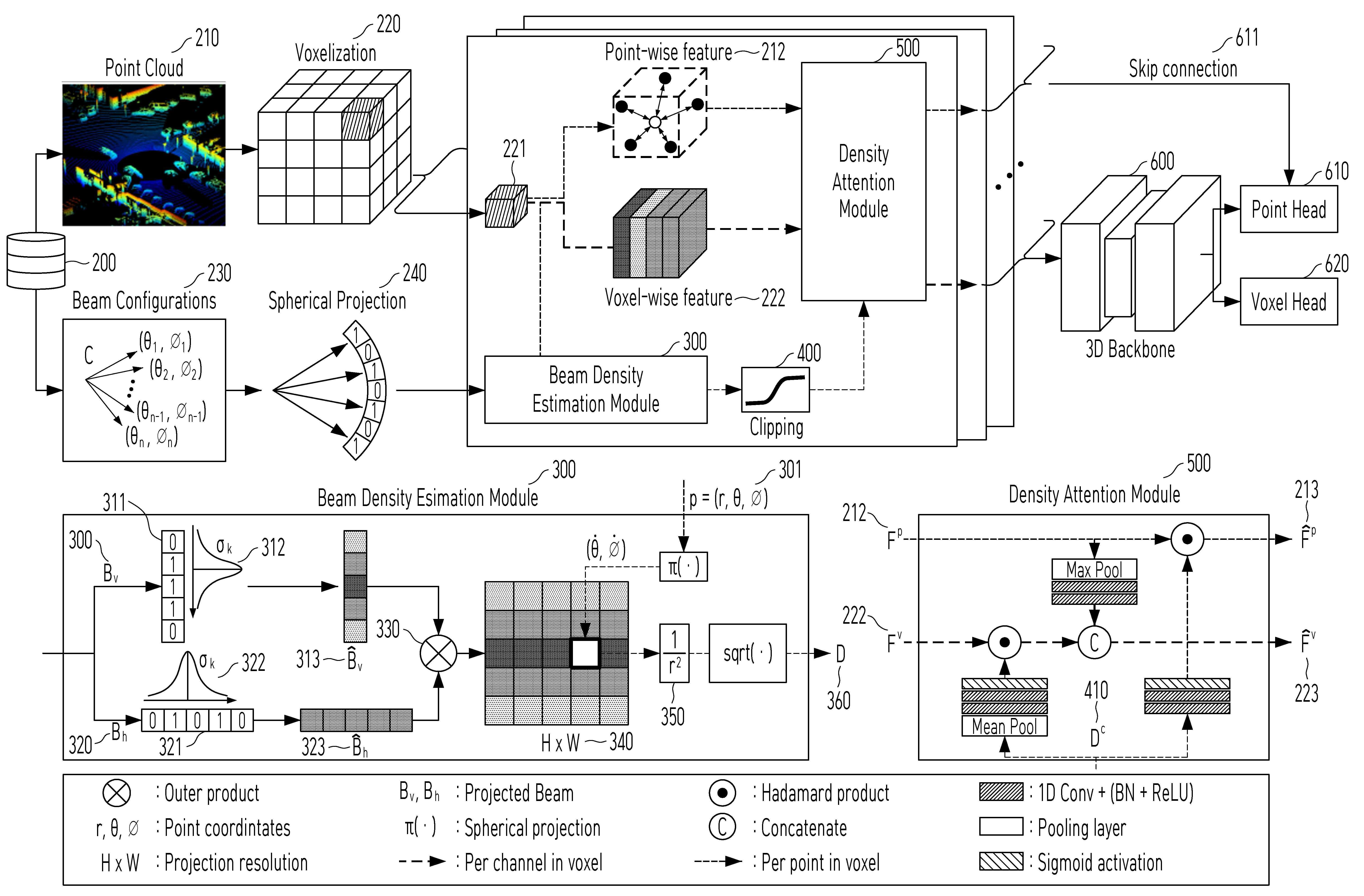
| 1 | 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램으로서, 상기 컴퓨터 프로그램은 하나 이상의 프로세서에서 실행되는 경우 객체 인식을 위한 이하의 방법들을 수행하도록 하며, 상기 방법은, 라이다에서 생성된 포인트 클라우드 데이터를 획득하는 단계; 상기 포인트 클라우드 데이터를 복셀(voxel)화 하여 복셀 데이터를 생성하는 단계; 상기 포인트 클라우드 데이터 및 상기 복셀 데이터 각각에 대한 피처를 추출하여 포인트 와이즈 피처(point wise feature) 및 복셀 와이즈 피처(voxel wise feature)를 생성하는 단계; 상기 포인트 와이즈 피처 및 상기 복셀 와이즈 피처 각각에 대하여 라이다 빔 밀도 어텐션을 부가하는 단계; 및 상기 라이다 빔 밀도 어텐션이 부가된 상기 포인트 와이즈 피처 및 상기 복셀 와이즈 피처에 기초하여 태스크 네트워크에서 객체 감지 태스크를 수행하는 단계; 를 포함하고, 상기 라이다 빔 밀도 어텐션은,라이다 구성 정보로부터 획득되는 라이다의 빔 밀도 정보에 기초하는, 상기 라이다 구성 정보는, 상기 라이다의 시야각 및 빔 개수에 관련한 정보를 적어도 부분적으로 포함하는, 상기 라이다 빔 밀도 정보는, 사전결정된 빔 밀도 범위로 클리핑되는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 2 | 제 1 항에 있어서, 상기 복셀 데이터의 각각의 복셀은 사전결정된 크기를 가지며 각각의 복셀은 각각의 복셀 별로 사전결정된 수의 포인트를 포함하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 3 | 삭제 |
| 4 | 삭제 |
| 5 | 제 1 항에 있어서, 상기 라이다 빔 밀도 정보는, 구면 좌표계로 표현되는 영역 별 라이다 빔의 밀도에 관련한 정보를 포함하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 6 | 제 5 항에 있어서, 상기 라이다 빔 밀도 정보는, 복셀 별 빔 밀도에 관련한 정보를 포함하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 7 | 제 1 항에 있어서, 상기 라이다 빔 밀도 정보는, 라이다 수직 빔 밀도 정보, 및 라이다 수평 빔 밀도 정보의 연산으로 획득되는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 8 | 제 7 항에 있어서, 상기 라이다 수직 빔 밀도 정보 및 상기 라이다 수평 빔 밀도 정보 각각은 수직 빔 이산 벡터 및 수평 빔 이산 벡터 각각에 대한 가우시안 커널을 적용한 결과인, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 9 | 제 1 항에 있어서, 상기 라이다 빔 밀도 정보는, 상기 라이다로부터의 거리의 제곱에 반비례하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 10 | 삭제 |
| 11 | 제 1 항에 있어서, 상기 클리핑은, 밀도 어텐션 모듈의 학습 데이터에 기초하여 결정되는 빔 밀도 범위인, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 12 | 제 11 항에 있어서, 상기 클리핑은, 수학식 6에 기초하는 소프트 클리핑인, 수학식 6:여기서, 는 포인트 클라우드의 포인트 의 클리핑된 빔 밀도이며, 및 은 학습 도메인에서의 밀도 임베딩에서 x번째와 y번째 채널 별 백분위 수 값을 추출하는 함수를 의미하며, x 003e# y 인, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 13 | 제 1 항에 있어서, 상기 포인트 클라우드 데이터는, 라이다에서 획득된 포인트 클라우드 데이터를 중첩하거나 샘플링한 데이터인, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 14 | 제 1 항에 있어서, 상기 라이다 빔 밀도 어텐션은, 상기 포인트 클라우드 데이터의 각각의 포인트에 대하여 수행되며, 상기 복셀 와이즈 피처에 대해서는 상기 복셀에 포함된 포인트에 대한 라이다 빔 밀도의 평균이 어텐션으로 부가되는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 15 | 제 1 항에 있어서, 상기 라이다 빔 밀도 어텐션은, 포인트 와이즈 피처에 대한 라이다 빔 밀도 어텐션은 수학식 7에 기초하며 그리고 복셀 와이즈 피처에 대한 라이다 빔 밀도 어텐션은 수학식 8에 기초하는, 수학식 7: 여기서, 는 포인트 와이즈 피처, 는 클리핑된 빔 밀도, 는 1D 컨벌루션 레이어, 시그모이드 함수를 포함하는 함수이며, 연산기호 는 아다마르 곱(Hadamard product)이고, 그리고수학식 8: 여기서, 는 포인트 와이즈 피처, 는 클리핑된 빔 밀도, 는 복셀 에 포함된 포인트의 수, 함수 는 1D 컨벌루션 레이어, 시그모이드 함수를 포함하는 함수, 연산기호 는 아다마르 곱이며, 함수 g는 복셀 에 대한 포인트 와이즈 피처에 대한 풀링을 포함하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 16 | 제 1 항에 있어서, 상기 객체 감지 태스크는, 상기 포인트 클라우드 데이터 및 상기 복셀 데이터 각각에 대하여 수행되며, 상기 태스크 네트워크에서 상기 포인트 클라우드 데이터를 처리하는 포인트 네트워크 부분에 포인트 와이즈 피처의 스킵 커넥션이 연결되는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 17 | 객체 인식을 위한 방법으로서, 라이다에서 생성된 포인트 클라우드 데이터를 획득하는 단계; 상기 포인트 클라우드 데이터를 복셀(voxel)화 하여 복셀 데이터를 생성하는 단계; 상기 포인트 클라우드 데이터 및 상기 복셀 데이터 각각에 대한 피처를 추출하여 포인트 와이즈 피처(point wise feature) 및 복셀 와이즈 피처(voxel wise feature)를 생성하는 단계; 상기 포인트 와이즈 피처 및 상기 복셀 와이즈 피처 각각에 대하여 라이다 빔 밀도 어텐션을 부가하는 단계; 및 상기 라이다 빔 밀도 어텐션이 부가된 상기 포인트 와이즈 피처 및 상기 복셀 와이즈 피처에 기초하여 태스크 네트워크에서 객체 감지 태스크를 수행하는 단계; 를 포함하고,상기 라이다 빔 밀도 어텐션은,라이다 구성 정보로부터 획득되는 라이다의 빔 밀도 정보에 기초하는, 상기 라이다 구성 정보는, 상기 라이다의 시야각 및 빔 개수에 관련한 정보를 적어도 부분적으로 포함하는, 상기 라이다 빔 밀도 정보는, 사전결정된 빔 밀도 범위로 클리핑되는, 객체 인식을 위한 방법. |
| 18 | 컴퓨터 장치로서, 하나 이상의 프로세서; 및 상기 하나 이상의 프로세서에서 실행가능한 명령들을 저장하는 메모리;를 포함하며, 상기 하나 이상의 프로세서는, 라이다에서 생성된 포인트 클라우드 데이터를 획득하고,상기 포인트 클라우드 데이터를 복셀(voxel)화 하여 복셀 데이터를 생성하고,상기 포인트 클라우드 데이터 및 상기 복셀 데이터 각각에 대한 피처를 추출하여 포인트 와이즈 피처(point wise feature) 및 복셀 와이즈 피처(voxel wise feature)를 생성하고,상기 포인트 와이즈 피처 및 상기 복셀 와이즈 피처 각각에 대하여 라이다 빔 밀도 어텐션을 부가하고, 그리고, 상기 라이다 빔 밀도 어텐션이 부가된 상기 포인트 와이즈 피처 및 상기 복셀 와이즈 피처에 기초하여 태스크 네트워크에서 객체 감지 태스크를 수행하고,상기 라이다 빔 밀도 어텐션은,라이다 구성 정보로부터 획득되는 라이다의 빔 밀도 정보에 기초하는, 상기 라이다 구성 정보는, 상기 라이다의 시야각 및 빔 개수에 관련한 정보를 적어도 부분적으로 포함하는, 상기 라이다 빔 밀도 정보는, 사전결정된 빔 밀도 범위로 클리핑되는, 컴퓨터 장치. |