| 번호 | 청구항 |
|---|---|
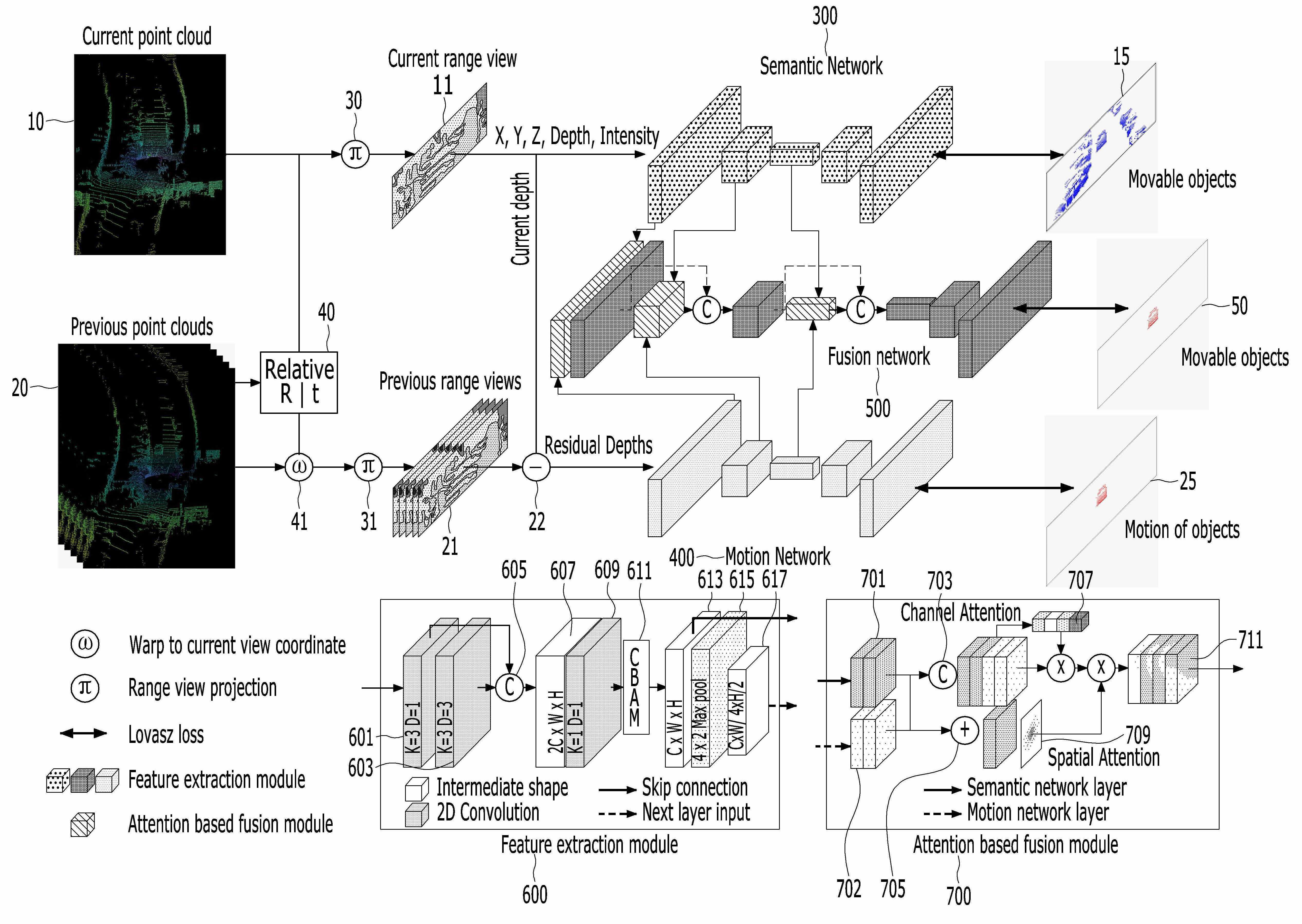
| 1 | 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램으로서, 상기 컴퓨터 프로그램은 하나 이상의 프로세서에서 실행되는 경우 객체 인식을 위한 이하의 방법들을 수행하도록 하며, 상기 방법은, 하나 이상의 시점의 라이다 데이터를 전처리하여 레인지 뷰(range view) 데이터를 생성하는 단계; 시멘틱 네트워크에서 현재 시점 레인지 뷰 데이터를 이용하여 잠재 이동가능 객체를 인식하는 단계; 모션 네트워크에서 현재 시점 레인지 뷰 데이터 및 이전 시점 레인지 뷰 데이터의 잔차 데이터에 기초하여 객체의 움직임을 인식하는 단계; 및 퓨전 네트워크에서 상기 시멘틱 네트워크의 피처 및 상기 모션 네트워크의 피처에 기초하여 이동 객체를 인식하는 단계; 를 포함하고, 상기 이전 시점 레인지 뷰 데이터는, 복수의 프레임으로 구성된 이전 시점의 라이다 데이터를 현재 시점의 관측자 위치를 기준으로 한 좌표계로 보정한 좌표계 보정 라이다 데이터에 기초하여 생성되고,상기 이전 시점의 라이다 데이터는, 현재 시점 이전 1 초 시점까지의 라이다 데이터를 포함하며, 현재 시점의 라이다 데이터를 포함하여 10개의 프레임을 포함하는,컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 2 | 제 1 항에 있어서, 상기 라이다 데이터는, 3차원 좌표를 가지는 점들로 구성된 데이터이며, 상기 레인지 뷰 데이터는, 상기 라이다 데이터를 2차원 좌표계로 나타낸 데이터로, 상기 레인지 뷰 데이터에 포함된 각각의 점들은 3차원 좌표값, 라이다 데이터의 강도 및 관측자와의 거리 값을 포함하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 3 | 삭제 |
| 4 | 제 1 항에 있어서, 상기 이전 시점의 라이다 데이터는, 관측자 속도에 기초하여 결정되는 기준 시점 까지의 복수의 프레임을 포함하며, 관측자 속도가 빠를수록 기준 시점은 현재 시점에 가까우며, 관측자 속도가 느릴수록 기준 시점은 현재 시점과 먼, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 5 | 삭제 |
| 6 | 제 1 항에 있어서, 상기 잔차 데이터는, 상기 라이다 데이터의 n 프레임 간격 또는 2n 프레임 간격의 라이다 데이터에 대한 잔차 데이터인, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 7 | 제 1 항에 있어서, 상기 잔차 데이터의 프레임 간격은,상기 모션 네트워크 및 상기 퓨전 네트워크의 학습시의 최소 간격과 상기 모션 네트워크와 상기 퓨전 네트워크의 추론시의 최소 간격이 서로 상이한, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 8 | 제 1 항에 있어서, 상기 잔차 데이터는 상기 모션 네트워크 및 상기 퓨전 네트워크의 학습시 상기 라이다 데이터의 n프레임 간격 또는 2n 프레임 간격의 라이다 데이터에 대한 잔차 데이터이며, 상기 모션 네트워크 및 상기 퓨전 네트워크의 추론시 상기 라이다 데이터의 2n 프레임 간격의 라이다 데이터에 대한 잔차 데이터인, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 9 | 제 1 항에 있어서, 상기 잔차 데이터는, 상기 네트워크들의 학습 중 사전결정된 확률로 0 값이 입력되는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 10 | 제 9 항에 있어서, 상기 사전결정된 확률은 상기 네트워크들의 학습 단계에 따라서 상이한, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 11 | 제 1 항에 있어서, 상기 각각의 네트워크들은,컨벌루션 커널을 포함하는 인코더 및 디코더로 구성된, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 12 | 제 1 항에 있어서, 상기 각각의 네트워크들의 인코더를 구성하는 피처 추출 모듈은, 입력 데이터에 팽창률(dilation rate)이 상이한 2 이상의 컨벌루션 커널을 이용하여 컨벌루션 연산을 적용하고, 상기 컨벌루션 커널들의 출력값을 결합(concatenate) 시키고, 결합된 값에 어텐션(attention)을 적용하고, 풀링(pooling)을 적용하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 13 | 제 12 항에 있어서, 상기 풀링은, 이전 레이어의 출력에 대하여 가로가 세로 보다 긴 영역에 대한 풀링을 수행하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 14 | 제 1 항에 있어서, 상기 퓨전 네트워크는, 상기 시멘틱 네트워크 및 상기 모션 네트워크의 대응되는 레이어의 출력 값을 입력으로 받아 채널 및 공간(Spatial) 어텐션을 적용하는 어텐션 기반 퓨전 모듈을 포함하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 15 | 제 14 항에 있어서, 상기 어텐션 기반 퓨전 모듈은, 상기 시멘틱 네트워크 및 상기 모션 네트워크의 대응되는 레이어의 출력값을 결합(concatenate)시켜 채널 어텐션을 적용하고, 상기 시멘틱 네트워크 및 상기 모션 네트워크의 대응되는 레이어의 출력값을 더하여 공간 어텐션을 적용하고 상기 채널 어텐션이 적용된 값 및 공간 어탠션이 적용된 값을 곱해 출력을 생성하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 16 | 제 14 항에 있어서, 상기 퓨전 네트워크는, 상기 어텐션 기반 퓨전 모듈의 출력값을 피처 추출 모듈로 연산하도록 하나의 레이어를 구성하며, 상기 하나의 레이어의 출력 값은 다음 레이어의 어텐션 기반 퓨전 모듈의 출력 값과 결합되도록 구성된 인코더를 포함하는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 17 | 제 1 항에 있어서, 상기 시멘틱 네트워크, 상기 모션 네트워크 및 상기 퓨전 네트워크 중 적어도 하나는 레이블된 데이터에 기초하여 교사학습(supervised learning)되는, 컴퓨터 판독가능 저장 매체에 저장된 컴퓨터 프로그램. |
| 18 | 컴퓨터 장치의 하나 이상의 프로세서에서 수행되는 객체 인식을 위한 방법으로서, 하나 이상의 시점의 라이다 데이터를 전처리하여 레인지 뷰(range view) 데이터를 생성하는 단계; 시멘틱 네트워크에서 현재 시점 레인지 뷰 데이터를 이용하여 잠재 이동가능 객체를 인식하는 단계; 모션 네트워크에서 현재 시점 레인지 뷰 데이터 및 이전 시점 레인지 뷰 데이터의 잔차 데이터에 기초하여 객체의 움직임을 인식하는 단계; 및 퓨전 네트워크에서 상기 시멘틱 네트워크의 피처 및 상기 모션 네트워크의 피처에 기초하여 이동 객체를 인식하는 단계; 를 포함하고, 상기 이전 시점 레인지 뷰 데이터는, 복수의 프레임으로 구성된 이전 시점의 라이다 데이터를 현재 시점의 관측자 위치를 기준으로 한 좌표계로 보정한 좌표계 보정 라이다 데이터에 기초하여 생성되고,상기 이전 시점의 라이다 데이터는, 현재 시점 이전 1 초 시점까지의 라이다 데이터를 포함하며, 현재 시점의 라이다 데이터를 포함하여 10개의 프레임을 포함하는,방법. |
| 19 | 컴퓨터 장치로서, 하나 이상의 프로세서; 및 메모리;를 포함하며, 상기 하나 이상의 프로세서는, 하나 이상의 시점의 라이다 데이터를 전처리하여 레인지 뷰(range view) 데이터를 생성하고,시멘틱 네트워크에서 현재 시점 레인지 뷰 데이터를 이용하여 잠재 이동가능 객체를 인식하고,모션 네트워크에서 현재 시점 레인지 뷰 데이터 및 이전 시점 레인지 뷰 데이터의 잔차 데이터에 기초하여 객체의 움직임을 인식하고, 그리고퓨전 네트워크에서 상기 시멘틱 네트워크의 피처 및 상기 모션 네트워크의 피처에 기초하여 이동 객체를 인식하고,상기 이전 시점 레인지 뷰 데이터는, 복수의 프레임으로 구성된 이전 시점의 라이다 데이터를 현재 시점의 관측자 위치를 기준으로 한 좌표계로 보정한 좌표계 보정 라이다 데이터에 기초하여 생성되고,상기 이전 시점의 라이다 데이터는, 현재 시점 이전 1 초 시점까지의 라이다 데이터를 포함하며, 현재 시점의 라이다 데이터를 포함하여 10개의 프레임을 포함하는,컴퓨터 장치. |