| 번호 | 청구항 |
|---|---|
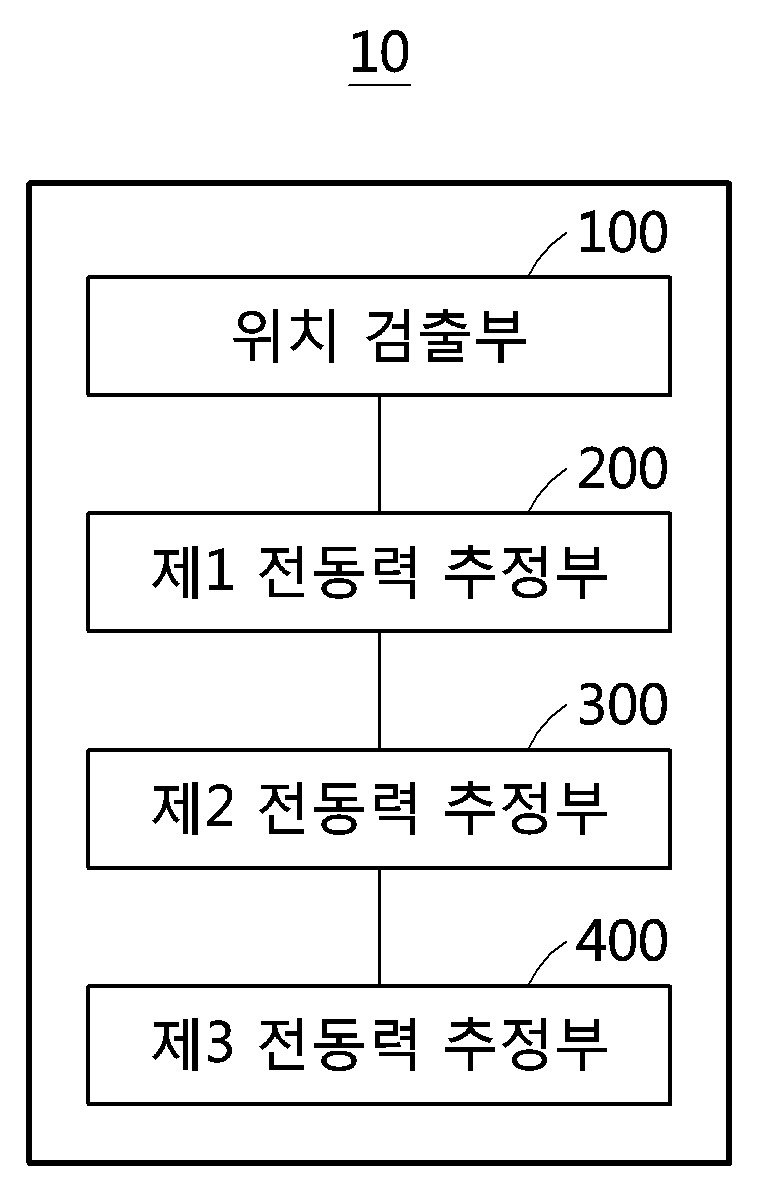
| 1 | 구동기에 장착되어 상기 구동기의 위치 정보 및 부하의 위치 정보를 검출하는 위치 검출부;상기 구동기의 위치 정보를 이용하여 동역학 기반으로 상기 구동기의 제1 전동력을 추정하는 제1 전동력 추정부;상기 구동기의 위치 정보 및 상기 부하의 위치 정보를 이용하여 탄성 모델 기반으로 상기 구동기의 제2 전동력을 추정하는 제2 전동력 추정부; 및상기 제1 전동력 추정부에서 추정된 상기 구동기의 제1 전동력 및 제2 전동력 추정부에서 추정된 상기 구동기의 제2 전동력을 합산하여 상기 구동기의 제3 전동력을 추정하는 제3 전동력 추정부;를 포함하는 구동기의 전동력 측정 시스템. |
| 2 | 제1항에 있어서,상기 제3 전동력 추정부에서는 상기 제2 전동력 추정부에서 추정된 구동기의 제2 전동력에 고역 통과 필터를 적용한 후에 상기 제1 전동력 추정부에서 추정된 구동기의 제1 전동력을 합산하는 구동기의 전동력 측정 시스템. |
| 3 | 제2항에 있어서,상기 제2 전동력 추정부에서는 상기 탄성 모델의 오차에 발생된 측정 오차가 산출되고, 상기 제3 전동력 추정부에서 상기 탄성 모델의 오차에 의해 발생된 측정 오차가 고역 필터링되는 구동기의 전동력 측정 시스템. |
| 4 | 제1항에 있어서,상기 제1 전동력 추정부에서는 상기 구동기에서 마찰에 의해 발생된 측정 오차의 저역 필터링 성분이 산출되고, 상기 제1 전동력 추정부에서 산출된 상기 구동기에서 마찰에 의해 발생된 측정 오차의 저역 필터링 성분이 상기 제3 전동력 추정부에서 유지되는 구동기의 전동력 측정 시스템. |
| 5 | 삭제 |
| 6 | 제2항에 있어서,상기 제1 전동력 추정부에는 저역 통과 필터가 구비되고,상기 고역 통과 필터는 상기 저역 통과 필터와 주파수 대역이 동일한 구동기의 전동력 측정 시스템. |
| 7 | 삭제 |
| 8 | 삭제 |
| 9 | 구동기의 위치 정보 및 부하의 위치 정보가 측정되는 단계;상기 구동기의 위치 정보를 이용하여 동역학 기반으로 상기 구동기의 제1 전동력이 추정되고, 상기 구동기의 위치 정보 및 상기 부하의 위치 정보를 이용하여 탄성 모델 기반으로 상기 구동기의 제2 전동력이 추정되는 단계; 및상기 구동기의 제1 전동력 및 상기 구동기의 제2 전동력을 합산하여 상기 구동기의 제3 전동력이 추정되는 단계;를 포함하고,상기 구동기의 제1 전동력 및 상기 구동기의 제2 전동력을 합산하여 상기 구동기의 제3 전동력이 추정되는 단계에서, 상기 구동기의 제2 전동력에 고역 통과 필터가 적용된 후에 상기 구동기의 제1 전동력이 합산되는 구동기의 전동력 측정 방법. |
| 10 | 삭제 |