| 번호 | 청구항 |
|---|---|
| 6 | 제1항에 있어서,상기 복수의 정규화 방법은,중심화(Center) 방법, 표준편차 스케일링(standard deviation scaling) 방법, Z-점수(Z-score) 방법, 및 최소값-최대값(Minmax) 방법 중 적어도 하나를 포함하는,관측 변수 결정 방법. |
| 4 | 제3항에 있어서,상기 코페네틱 상관계수의 값을 산출하는 단계는,[수학식 1]을 이용하여 해당 군집 모델과 연관된 코페네틱 상관계수의 값을 산출하는 단계를 포함하고,상기 i 및 j는 변수들을 나타내는 인덱스이고, 상기 는 상기 해당 군집 모델을 생성하기 위해 적용된 어느 하나의 정규화 방법 및 어느 하나의 거리 측도를 이용하여 계산된, 변수 와 변수 간의 거리를 나타내고, 상기 는 상기 거리들의 평균을 나타내고, 상기 는 상기 해당 군집 모델에 의해 정의되는, 변수 와 변수 간의 코페네틱 거리를 나타내고, 상기 는 상기 코페네틱 거리들의 평균을 나타내는,관측 변수 결정 방법. |
| 5 | 제1항에 있어서,상기 생성하는 단계는,상기 결정된 최적의 군집 모델에 의해 정의되는 군집 트리를, 선정된 절단 위치에서 절단하여 상기 적어도 하나의 군집을 생성하는 단계를 더 포함하는, 관측 변수 결정 방법. |
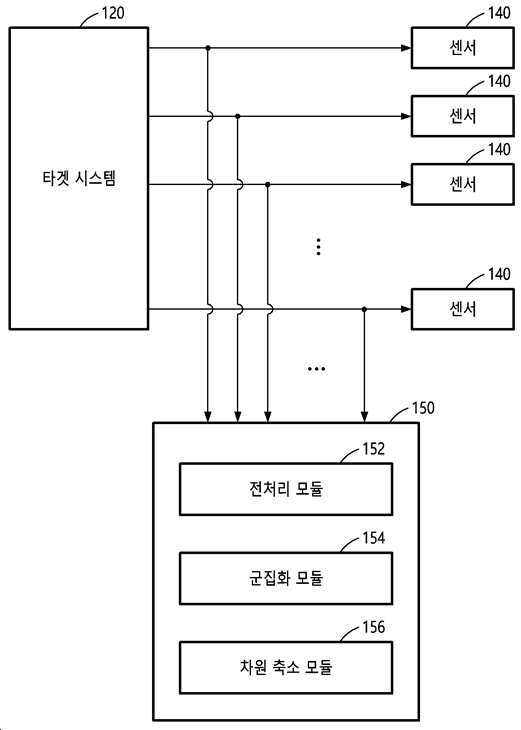
| 1 | 관측 변수 결정 장치에 의해 구현되는, 타겟 시스템을 위한 관측 변수를 결정하는 방법으로서,상기 관측 변수 결정 장치의 전처리 모듈에서, 상기 타겟 시스템을 위한 센서들로부터 측정 값들을 수집하는 단계;상기 전처리 모듈에서, 상기 센서들의 각각으로부터 수집된 측정 값들을 나타내는 변수를 정의하는 단계;상기 관측 변수 결정 장치의 군집화 모듈에서, 상기 변수들에 대해 계층적 군집화(hierarchical clustering)를 수행하여 적어도 하나의 군집(cluster)을 생성하는 단계; 및상기 관측 변수 결정 장치의 차원 축소 모듈에서, 상기 적어도 하나의 군집의 각각에 대해 차원 축소(dimension reduction)를 수행하여 상기 타겟 시스템을 위한 적어도 하나의 관측 변수를 결정하는 단계를 포함하고,상기 생성하는 단계는,상기 변수들에 대한 복수의 정규화(normalization) 방법, 상기 변수들 간의 복수의 거리 측도(distance measures), 및 상기 변수들을 군집화하기 위한 복수의 연결 함수(linkage functions)를 적용하여 상기 변수들에 대한 복수의 군집 모델을 생성하는 단계;상기 복수의 군집 모델의 각각과 연관된 코페네틱 상관계수(cophenetic correlation coefficient)의 값을 산출하는 단계; 및상기 코페네틱 상관계수의 값들 중 가장 큰 코페네틱 상관계수의 값과 연관된 군집 모델을 최적의 군집 모델로 결정하는 단계를 포함하는, 관측 변수 결정 방법. |
| 2 | 삭제 |
| 3 | 제1항에 있어서,상기 복수의 군집 모델을 생성하는 단계는,복수의 조합을 정의하는 단계; 및상기 복수의 조합의 각각을 적용하여 상기 변수들을 계층적으로 군집화하고, 상기 변수들 간의 코페네틱 거리들(cophenetic distances)을 정의하는 군집 모델을 생성하는 단계를 포함하고,상기 복수의 조합의 각각은,상기 복수의 정규화 방법 중 어느 하나, 상기 복수의 거리 측도 중 어느 하나 및 상기 복수의 연결 함수의 어느 하나로 구성되는,관측 변수 결정 방법. |
| 7 | 제1항에 있어서,상기 복수의 거리 측도는,유클리디언 거리(Euclidean distance), 마할라노비스 거리(Mahalanobis distance), 민코프스키 거리(Minkowski distance), 도시블록 거리(City block distance), 피어슨 상관 거리(Pearson correlation distance), 및 스피어만 상관 거리(Spearman correlation distance) 중 적어도 하나를 포함하는,관측 변수 결정 방법. |
| 8 | 제1항에 있어서,상기 복수의 연결 함수는,최단거리 연결(Nearest neighbor linkage) 함수, 최장거리 연결(Farthest neighbor linkage) 함수, 평균 연결(Average linkage) 함수, 가중 평균 연결(Weighted average linkage) 함수, 및 와드 연결(Ward linkage) 함수 중 적어도 하나를 포함하는,관측 변수 결정 방법. |
| 9 | 제1항에 있어서,상기 관측 변수를 결정하는 단계는,해당 군집에 속하는 변수들을 선형 변환하여 상기 변수들의 개수보다 적은 개수의 주성분을 제공하고, 상기 제공된 주성분을 상기 적어도 하나의 관측 변수로서 결정하는 단계를 포함하는, 관측 변수 결정 방법. |
| 10 | 제9항에 있어서,상기 주성분을 상기 적어도 하나의 관측 변수로서 결정하는 단계는,[수학식 2]에서 의 주성분들의 분산(variance) 값들이 내림순으로 정렬되도록 하는 를 찾는 단계를 포함하고,상기 는 상기 해당 군집에 속하는 변수들로 구성되는 매트릭스(matrix)이고, 상기 는 주성분들로 구성되는 주성분 매트릭스(principal component matrix)이고, 상기 는 를 로 선형 변환하는 고유벡터(eigenvector)인,관측 변수 결정 방법. |
| 11 | 제10항에 있어서,상기 주성분을 상기 적어도 하나의 관측 변수로서 결정하는 단계는,상기 의 주성분들 중[수학식 3]에 따라 d개의 주성분들을 선택하는 단계를 더 포함하고,상기 는 의 주성분의 고유값(eigenvalue)이고, 상기 p는 의 주성분들의 개수이고, 상기 는 의 주성분들의 고유값들의 평균이고, 상기 는 선택되는 d개의 주성분들을 나타내는,관측 변수 결정 방법. |
| 12 | 제11항에 있어서,상기 주성분을 상기 적어도 하나의 관측 변수로서 결정하는 단계는,[수학식 4]에 의해 정의되는 설명된 누적 분산 백분률 가 선정된 퍼센트 이상이 되게 하는 최소의 i를 결정하는 단계; 및상기 의 주성분들 중 상기 결정된 최소의 i번째까지의 주성분들을 상기 적어도 하나의 관측 변수로서 결정하는 단계를 더 포함하고,상기 는 의 i번째 주성분의 분산을 나타내고, 상기 는 의 j번째 주성분의 분산을 나타내고, 상기 는 설명된 누적 분산 백분율(cumulative percentage of variance explained)을 나타내는,관측 변수 결정 방법. |
| 13 | 타겟 시스템을 위한 관측 변수를 결정하기 위한 장치로서,상기 타겟 시스템을 위한 센서들로부터 측정 값들을 수집하고, 상기 센서들의 각각으로부터 수집된 측정 값들을 나타내는 변수를 정의하는 전처리 모듈;상기 변수들에 대해 계층적 군집화를 수행하여 적어도 하나의 군집을 생성하는 군집화 모듈; 및상기 적어도 하나의 군집의 각각에 대해 차원 축소를 수행하여 상기 타겟 시스템을 위한 적어도 하나의 관측 변수를 결정하는 차원 축소 모듈을 포함하고,상기 군집화 모듈은,상기 변수들에 대한 복수의 정규화 방법, 상기 변수들 간의 복수의 거리 측도, 및 상기 변수들을 군집화하기 위한 복수의 연결 함수를 적용하여 상기 변수들에 대한 복수의 군집 모델을 생성하고, 상기 복수의 군집 모델의 각각과 연관된 코페네틱 상관계수의 값을 산출하고, 상기 코페네틱 상관계수의 값들 중 가장 큰 코페네틱 상관계수의 값과 연관된 군집 모델을 최적의 군집 모델로 결정하는,관측 변수 결정 장치. |
| 14 | 삭제 |
| 15 | 제13항에 있어서,상기 군집화 모듈은,복수의 조합을 정의하고, 상기 복수의 조합의 각각을 적용하여 상기 변수들을 계층적으로 군집화하고, 상기 변수들 간의 코페네틱 거리들을 정의하는 군집 모델을 생성하고,상기 복수의 조합의 각각은,상기 복수의 정규화 방법 중 어느 하나, 상기 복수의 거리 측도 중 어느 하나 및 상기 복수의 연결 함수의 어느 하나로 구성되는,관측 변수 결정 장치. |
| 16 | 제15항에 있어서,상기 군집화 모듈은,[수학식 1]을 이용하여 해당 군집 모델과 연관된 코페네틱 상관계수의 값을 산출하고,상기 i 및 j는 변수들을 나타내는 인덱스이고, 상기 는 상기 해당 군집 모델을 생성하기 위해 적용된 어느 하나의 정규화 방법 및 어느 하나의 거리 측도를 이용하여 계산된, 변수 와 변수 간의 거리를 나타내고, 상기 는 상기 거리들의 평균을 나타내고, 상기 는 상기 해당 군집 모델에 의해 정의되는, 변수 와 변수 간의 코페네틱 거리를 나타내고, 상기 는 상기 코페네틱 거리들의 평균을 나타내는,관측 변수 결정 장치. |
| 17 | 제13항에 있어서,상기 군집화 모듈은,상기 결정된 최적의 군집 모델에 의해 정의되는 군집 트리를, 선정된 절단 위치에서 절단하여 상기 적어도 하나의 군집을 생성하는,관측 변수 결정 장치. |
| 18 | 제13항에 있어서,상기 복수의 정규화 방법은,중심화 방법, 표준편차 스케일링 방법, Z-점수 방법, 및 최소값-최대값 방법 중 적어도 하나를 포함하는,관측 변수 결정 장치. |
| 19 | 제13항에 있어서,상기 복수의 거리 측도는,유클리디언 거리, 마할라노비스 거리, 민코프스키 거리, 도시블록 거리, 피어슨 상관 거리, 및 스피어만 상관 거리 중 적어도 하나를 포함하는,관측 변수 결정 장치. |
| 20 | 제13항에 있어서,상기 복수의 연결 함수는,최단거리 연결 함수, 최장거리 연결 함수, 평균 연결 함수, 가중 평균 연결 함수, 및 와드 연결 함수 중 적어도 하나를 포함하는,관측 변수 결정 장치. |
| 21 | 제13항에 있어서,상기 차원 축소 모듈은,해당 군집에 속하는 변수들을 선형 변환하여 상기 변수들의 개수보다 적은 개수의 주성분을 제공하고, 상기 제공된 주성분을 상기 적어도 하나의 관측 변수로서 결정하는,관측 변수 결정 장치. |
| 22 | 제21항에 있어서,상기 차원 축소 모듈은,[수학식 2]에서 의 주성분들의 분산 값들이 내림순으로 정렬되도록 하는 를 찾고,상기 는 상기 해당 군집에 속하는 변수들로 구성되는 매트릭스(matrix)이고, 상기 는 주성분들로 구성되는 주성분 매트릭스(principal component matrix)이고, 상기 는 를 로 선형 변환하는 고유벡터(eigenvector)인,관측 변수 결정 장치. |
| 23 | 제22항에 있어서,상기 차원 축소 모듈은,상기 의 주성분들 중[수학식 3]에 따라 d개의 주성분들을 선택하고,상기 는 의 주성분의 고유값(eigenvalue)이고, 상기 p는 의 주성분들의 개수이고, 상기 는 의 주성분들의 고유값들의 평균이고, 상기 는 선택되는 d개의 주성분들을 나타내는,관측 변수 결정 장치. |
| 24 | 제23항에 있어서,상기 차원 축소 모듈은,[수학식 4]에 의해 정의되는 설명된 누적 분산 백분률 가 선정된 퍼센트 이상이 되게 하는 최소의 i를 결정하고, 상기 의 주성분들 중 상기 결정된 최소의 i번째까지의 주성분들을 상기 적어도 하나의 관측 변수로서 결정하고,상기 는 의 i번째 주성분의 분산을 나타내고, 상기 는 의 j번째 주성분의 분산을 나타내고, 상기 는 설명된 누적 분산 백분율(cumulative percentage of variance explained)을 나타내는,관측 변수 결정 장치. |
| 25 | 제1항, 제3항 내지 제12항의 방법 중 어느 하나의 방법을 실행하기 위한, 컴퓨터 판독가능 기록매체에 저장된 컴퓨터 프로그램. |