| 번호 | 청구항 |
|---|---|
| 3 | 제2항에 있어서,상기 로컬 시맨틱 디스크립터들의 결합 전에 상기 로컬 시맨틱 디스크립터들을 정규화하는 단계를 더 포함하는 방법. |
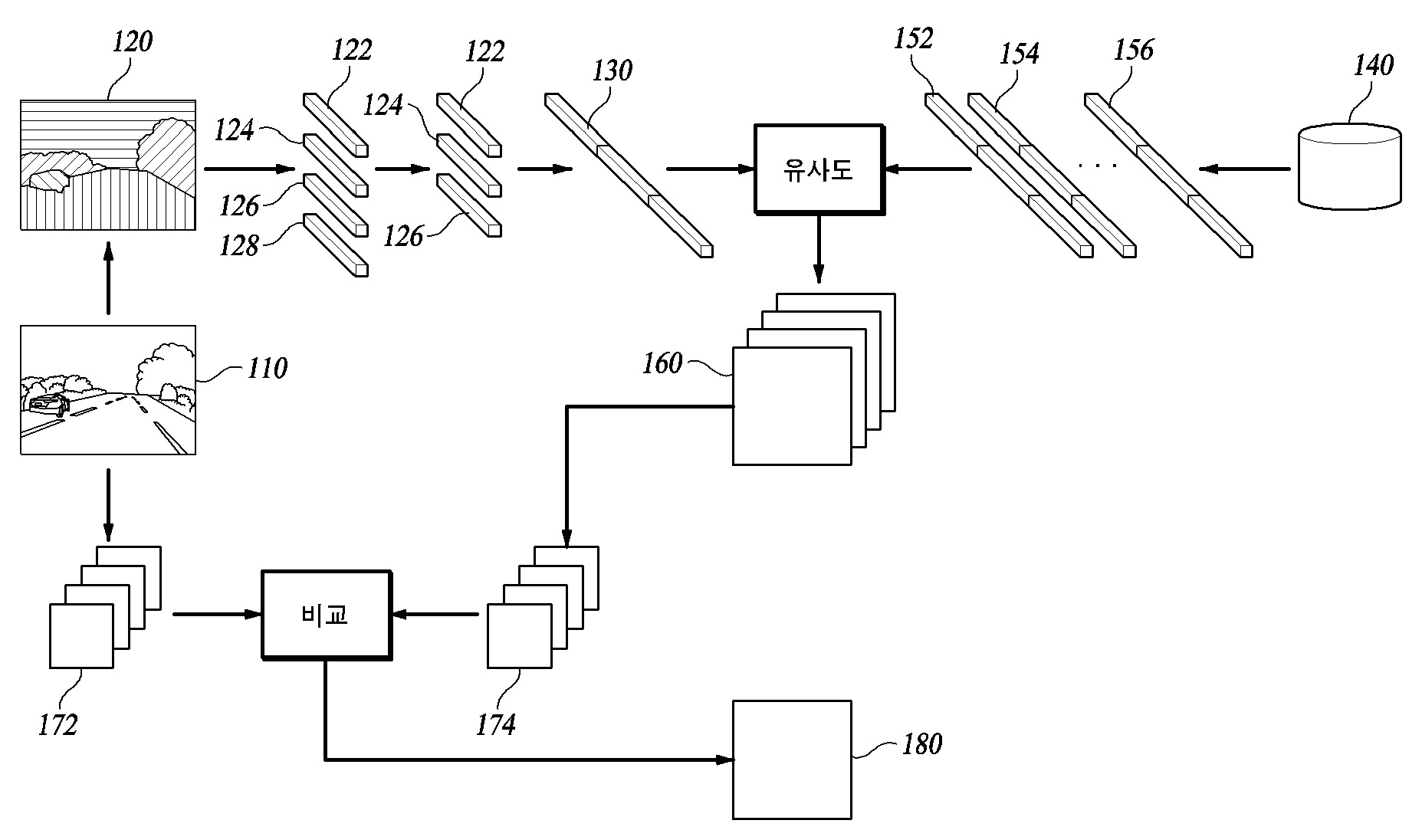
| 1 | 현재 장소를 인식하기 위한 컴퓨터 구현 방법에 있어서,쿼리 이미지로부터 기 정의된 정적 객체 클래스들에 대한 제1 글로벌 시맨틱 디스크립터를 추출하는 단계;참조 이미지들로부터 상기 정적 객체 클래스들에 대한 제2 글로벌 시맨틱 디스크립터를 획득하는 단계;상기 제1 글로벌 시맨틱 디스크립터와 상기 제2 글로벌 시맨틱 디스크립터 간 유사도에 기초하여 상기 참조 이미지들로부터 기 설정된 개수의 후보 이미지들을 탐색하는 단계;상기 쿼리 이미지로부터 추출된 제1 특징맵 활성화들과 각 후보 이미지로부터 추출된 제2 특징맵 활성화들 간 비교에 기초하여 상기 후보 이미지들 중 최종 이미지를 선택하는 단계; 및상기 최종 이미지에 대응하여 미리 저장된 장소를 상기 쿼리 이미지의 장소로 결정하는 단계를 포함하는 방법. |
| 2 | 제1항에 있어서,상기 제1 글로벌 시맨틱 디스크립터를 추출하는 단계는,훈련 이미지로부터 훈련 픽셀단위 시맨틱 디스크립터들을 추출하도록 훈련된 신경망을 이용하여 상기 쿼리 이미지로부터 픽셀단위 시맨틱 디스크립터들을 추출하는 단계;상기 픽셀단위 시맨틱 디스크립터들을 기 정의된 객체 클래스들별로 집계함으로써, 전체 로컬 시맨틱 디스크립터들을 생성하는 단계 -상기 객체 클래스들은 상기 정적 객체 클래스들 및 동적 객체 클래스들을 포함함-;상기 전체 로컬 시맨틱 디스크립터들 중 상기 정적 객체 클래스들에 대한 로컬 시맨틱 디스크립터들을 결합함으로써, 상기 제1 글로벌 시맨틱 디스크립터를 생성하는 단계를 포함하는 방법. |
| 4 | 제1항에 있어서,상기 후보 이미지들을 탐색하는 단계는,상기 참조 이미지들 중 상기 정적 객체 클래스들에 대한 상기 제1 글로벌 시맨틱 디스크립터와의 유사도가 높은 이미지들을 상기 후보 이미지들로 결정하는 단계를 포함하는 방법. |
| 5 | 제1항에 있어서, 상기 최종 이미지를 선택하는 단계는,특징맵 활성화의 요소별 활성화 빈도에 따라, 상기 제1 특징맵 활성화들 및 상기 제2 특징맵 활성화들로부터 제1 빈도 맵 및 제2 빈도 맵을 각각 생성하는 단계;상기 제1 빈도 맵 내 제1 키포인트 위치들, 및 상기 제2 빈도 맵 내 제2 키포인트 위치들을 식별하는 단계;상기 제1 키포인트 위치들 및 상기 제2 키포인트 위치들 간 거리에 기초하여 상기 후보 이미지들로부터 상기 최종 이미지를 결정하는 단계를 포함하는 방법. |
| 6 | 명령어들을 저장하는 메모리; 및적어도 하나의 프로세서를 포함하되,상기 적어도 하나의 프로세서는 상기 명령어들을 실행함으로써,쿼리 이미지로부터 기 정의된 정적 객체 클래스들에 대한 제1 글로벌 시맨틱 디스크립터를 추출하고,참조 이미지들로부터 상기 정적 객체 클래스들에 대한 제2 글로벌 시맨틱 디스크립터를 획득하고,상기 제1 글로벌 시맨틱 디스크립터와 상기 제2 글로벌 시맨틱 디스크립터 간 유사도에 기초하여 상기 참조 이미지들로부터 기 설정된 개수의 후보 이미지들을 탐색하고,상기 쿼리 이미지로부터 추출된 제1 특징맵 활성화들과 각 후보 이미지로부터 추출된 제2 특징맵 활성화들 간 비교에 기초하여 상기 후보 이미지들 중 최종 이미지를 선택하고,상기 최종 이미지에 대응하여 미리 저장된 장소를 상기 쿼리 이미지의 장소로 결정하는, 장소 인식 장치. |
| 7 | 제6항에 있어서,상기 적어도 하나의 프로세서는, 훈련 이미지로부터 훈련 픽셀단위 시맨틱 디스크립터들을 추출하도록 훈련된 신경망을 이용하여 상기 쿼리 이미지로부터 픽셀단위 시맨틱 디스크립터들을 추출하고,상기 픽셀단위 시맨틱 디스크립터들을 기 정의된 객체 클래스들별로 집계함으로써, 전체 로컬 시맨틱 디스크립터들을 생성하고 -상기 객체 클래스들은 상기 정적 객체 클래스들 및 동적 객체 클래스들을 포함함-,상기 전체 로컬 시맨틱 디스크립터들 중 상기 정적 객체 클래스들에 대한 로컬 시맨틱 디스크립터들을 결합함으로써, 상기 제1 글로벌 시맨틱 디스크립터를 생성하는, 장소 인식 장치. |
| 8 | 제7항에 있어서,상기 적어도 하나의 프로세서는, 상기 로컬 시맨틱 디스크립터들의 결합 전에 상기 로컬 시맨틱 디스크립터들을 정규화하는, 장소 인식 장치. |
| 9 | 제6항에 있어서,상기 적어도 하나의 프로세서는, 상기 참조 이미지들 중 상기 정적 객체 클래스들에 대한 상기 제1 글로벌 시맨틱 디스크립터와의 유사도가 높은 이미지들을 상기 후보 이미지들로 결정하는, 장소 인식 장치. |
| 10 | 제6항에 있어서, 상기 적어도 하나의 프로세서는, 특징맵 활성화의 요소별 활성화 빈도에 따라, 상기 제1 특징맵 활성화들 및 상기 제2 특징맵 활성화들로부터 제1 빈도 맵 및 제2 빈도 맵을 각각 생성하고,상기 제1 빈도 맵 내 제1 키포인트 위치들, 및 상기 제2 빈도 맵 내 제2 키포인트 위치들을 식별하고,상기 제1 키포인트 위치들 및 상기 제2 키포인트 위치들 간 거리에 기초하여 상기 후보 이미지들로부터 상기 최종 이미지를 결정하는, 장소 인식 장치. |