| 번호 | 청구항 |
|---|---|
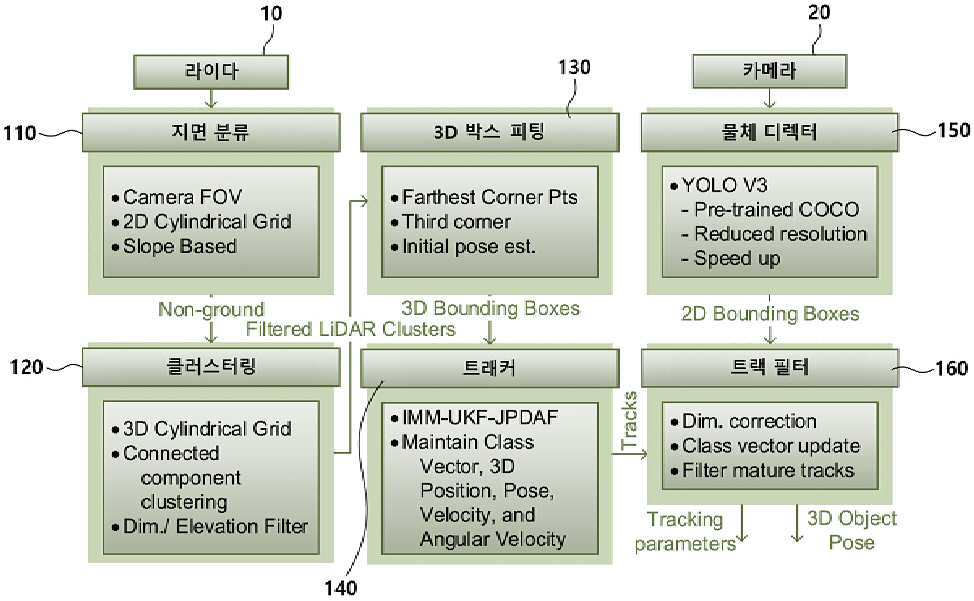
| 1 | 물체를 인식하기 위한 제1 센서인 라이다에서 생성된 포인트 클라우드에 대하여 지면 포인트 클라우드와 비 지면 포인트 클라우드로 구분하기 위한 지면 분류 모듈;상기 지면 분류 모듈에서 분류된 포인트 클라우드에 대하여 하나의 물체에 속하는 포인트들을 그룹핑하고 라벨링하는 방식으로 클러스터링 작업을 수행하기 위한 클러스터링 모듈;상기 클러스터링 모듈에서 클러스터링된 포인트들에 대하여 물체를 나타내는 3D 경계 박스를 생성하고, 생성된 박스 영역을 이용하여 물체를 분류하기 위한 박스 피팅 모듈; 상기 박스 피팅 모듈에서 분류된 물체를 트랙에 할당하여, 모션 패턴을 예측하여 추적하는 트래커 모듈;물체를 인식하기 위한 제2 센서인 카메라에서 촬영된 영상에서 물체를 인식하기 위한 물체 디텍터; 및상기 트래커 모듈에서 추적한 물체와 상기 물체 디텍터에서 인식한 물체를 융합하고, 가짜 트랙을 취소하고, 트랙을 유지하고 관리하는 트랙 관리 모듈을 포함하고, 상기 지면 분류 모듈은, 포인트 클라우드의 인덱스를 원통형 극 그리드에 분포시키고, 상기 원통형 극 그리드에서 라이다가 위치한 높이와 동일한 지면 레벨을 기준으로 지면 포인트 클라우드와 비 지면 포인트 클라우드를 분류하고, 상기 클러스터링 모듈은, 비 지면 포인트 클라우드에 대하여 3D 원통형 그리드에 분포시키고, 3D 원통형 그리드에서 선택된 인덱스 셀 주변에 있는 인접 셀에서 연관된 포인트들을 검색하고, 연관된 포인트가 존재하는 인접 셀을 클러스터 멤버로 표시하는 방식으로 클러스터링을 수행하고, 상기 박스 피팅 모듈은, L 형 클라우드 피팅을 갖는 최소 직사각형 영역을 사용하여 3D 경계 박스의 자세를 수정하고, 수정된 3D 경계 박스의 치수를 이용하여 물체를 분류하고, 상기 트랙 관리 모듈은, 트랙을 초기화하고 트랙의 유효성을 검사하는 초기화 및 유효성 검사 과정과, 불필요한 트랙을 제거하기 위한 프루닝(pruning) 과정과, 트랙 초기화가 진행된 후에 요, 속도 및 각속도 파라미터를 업데이트하는 과정을 수행하며, 상기 원통형 극 그리드는 채널(channel)로 구성되고, 채널은 원통형 극 그리드의 원점에서부터 가장 멀리 떨어진 값까지의 수직 슬라이스이고, 해당 영역의 가능한 포인트 수를 포함하는 빈(bin)으로 더 세분화되고, 극 그리드의 모든 빈들은 차량에서 시작하여 라이다 센서 높이와 동일한 지면 레벨인 로컬 지면 레벨을 추적하기 위해 횡단되어 있고, 어레이의 각 셀에 수직으로 슬라이스된 실린더의 섹션에 속하는 포인트 클라우드 측정의 인덱스가 채널과 빈(bin)으로 표시되고, 각 채널은 지면 수준을 추정하기 위해 차량에서 바깥쪽으로 향하게 독립적으로 횡단되고, 상기 지면 분류 모듈은 상기 극 그리드의 각 셀에서 지면으로부터의 센서 높이를 초기 지면 높이로 간주하고 연속된 셀의 가장 낮은 측정값까지의 기울기를 계산하고, 비지면 측정 및 이전 지면 수준을 포함하는 셀과 관련된 임계값을 초과하는 경사가 유지되고, 임계값 한계 내의 경사에 따라 후속 셀의 지면 수준을 업데이트하고, 그리드의 모든 셀이 지면 수준에 도달하면 포인트 클라우드가 허용오차 파라미터로 분리되어 에지 노이즈를 제거하고, 상기 지면 분류 모듈은 각 셀의 최저점과 최고점이 포인트 클라우드의 인덱스가 그리드에 분포될 때 발견되고, 각 채널을 두 번 횡단하는 대신, 빈을 따라 경사 및 로컬 지면 수준의 추정이 단일 횡단에서 수행되고, 포인트 클라우드 인덱스에 대한 반복 수행이 빈에 레이블을 지정하는 단계를 건너뛰고 지면 및 비 지면 포인트에 대한 포인트 클라우드를 형성하는데 활용되는 것으로 프로세스가 최적화되고, 상기 박스 피팅 모듈은 L 형 클라우드 피팅을 갖는 최소 직사각형 영역을 사용하여 3D 경계 박스의 자세를 수정하고, 수정된 3D 경계 박스의 치수를 이용하여 물체를 분류함에 있어서, 가로 축에서 클러스터된 포인트 클라우드의 모서리를 식별하기 위해 최소 박스 피팅을 정의하는 좌표가 있는 점의 인덱스를 탐색하고, 물체 클러스터의 치수와 위치에 따른 가장 먼 모서리를 사용하여 선을 만들고, 클러스터의 모든 점을 탐색하여 라인에서 가장 먼 점을 세 번째 모서리로 찾고, 세 모서리를 사용하여 경계 박스 및 중심의 치수를 업데이트하고, 업데이트된 중심에 대해 클러스터링된 물체의 자세를 계산하고, 상기 트랙 관리 모듈은 고유한 ID를 사용하여 관련되지 않은 측정에 대한 새 트랙을 시작하고 프레임 수 측면에서 추적 기간을 기록하고, 라이다 속성을 고려하는 동안 추적된 물체의 치수와 자세가 유지되도록 하고, 센서 특성과 유지된 정보를 이용하여 추적 대상 물체의 중심 C(Cx, Cy, Cz)를 수정하며, ΔL을 길이의 변화, ΔW을 너비의 변화, ΔH를 높이의 변화, ψ을 요(yaw)의 변화라고 할 때, 수정된 중심 좌표를, 의 수학식으로 나타낼 수 있는 것을 특징으로 하는 실시간 3차원 물체 인식 및 추적하는 시스템. |
| 2 | 삭제 |
| 3 | 삭제 |
| 4 | 삭제 |
| 5 | 청구항 1에 있어서, 상기 트래커 모듈은, 다른 모션 패턴을 캡쳐하기 위한 IMM(Interactive Multiple Model), 모션 모델의 비선형성을 처리하기 위한 UKF(Unscented Kalman Filter) 및 클루터(clutter) 존재시 상기 물체에 대한 측정 데이터를 연관시키기 위한 JPDAF(Joint Probabilistic Data Association Filter)를 포함하는 IMM-UKF-JPDAF를 이용하여 물체의 운동 상태를 추정하는 것을 특징으로 하는 실시간 3차원 물체 인식 및 추적하는 시스템. |
| 6 | 삭제 |