| 번호 | 청구항 |
|---|---|
| 9 | 제 1 항에 있어서,상기 대표값을 추출하는 단계는 상기 대표값을 추출하기 위해 평균 산출, 중앙값 산출 또는 가중평균 산출을 사용하는 것을 특징으로 하는 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 방법. |
| 10 | 제 1 항에 있어서,상기 특징거리(Feature distance) 값들을 산출하는 단계는 상기 기준 이미지의 진동 특성 값을 복수회 측정하여 복수 개의 진동 특성 값의 분포(이하, '특징 공간(Feature domain)'이라 함)와 상기 보정 이미지의 진동 특성 값 사이의 특징 거리를 산출하는 것을 특징으로 하는 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 방법. |
| 11 | 제 1 항에 있어서,상기 특징거리 값은 유클리드 거리(Euclidean distance) 방법 또는 마할라노비스 거리(Mahalanobis distance) 방법을 포함하는 통계적 거리 방법을 사용하여 산출하는 것을 특징으로 하는 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 방법. |
| 1 | 비선형 가중 필터(Non-linearity weighted filter)를 이용하여 기준이 되는 시점의 영상에서 구조물의 진동을 가시화한 이미지인 진동 특징 맵을 수신받아 기준 이미지로 설정하는 단계;상기 비선형 가중 필터(Non-linearity weighted filter)를 이용하여 상기 구조물의 상태를 검사하고자 하는 시점의 영상에서 상기 구조물의 진동을 가시화한 이미지인 진동 특징 맵(이하, '검사 이미지'라 함)을 수신받는 단계;상기 기준 이미지와 상기 검사 이미지의 특징점을 각각 추출하고 상기 검사 이미지의 특징점이 상기 기준 이미지의 특징점과 매칭되도록 변환시키는 이미지 변환 매트릭스를 산출하는 단계;상기 검사 이미지를 상기 기준 이미지의 위치와 정렬시키기 위해 산출된 이미지 변환 매트릭스를 활용하여 보정한 보정 이미지를 생성하는 단계;상기 기준 이미지에서 기설정된 크기의 픽셀로 구성된 각 로컬 영역 내의 픽셀값들과 상기 보정 이미지에서 기설정된 크기의 픽셀로 구성된 각 로컬 영역 내의 픽셀값들로부터 각 로컬 영역의 진동 특징을 대표하는 대표값을 추출하는 단계;상기 기준 이미지의 각 로컬 영역 대표값들과 대응하는 상기 보정 이미지의 각 로컬 영역 대표값들 사이의 특징거리(Feature distance) 값들을 산출하는 단계;산출된 특징거리 값들을 색 정보로 변환하는 단계; 및상기 기준 이미지에 변환된 색 정보를 오버레이(overlay)하여 시각화하는 단계;를 포함하는 것을 특징으로 하는 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 방법. |
| 2 | 제 1 항에 있어서,상기 기준 이미지와 상기 검사 이미지는 촬영 장치로 진동을 측정하여 결함 여부를 검사하고자 하는 구조물을 촬영한 영상을 수신받는 단계;수신받은 영상을 전처리하는 단계;전처리된 영상에 복수 개의 필터로 구성되는 필터 세트를 적용하여 프레임별로 각각 위상값을 산출하는 단계; 산출된 위상값을 기반으로 픽셀별 움직임(이하, '픽셀 변위' 라함)을 추정하기 위한 매개 변수들을 추출하는 단계;추출된 매개 변수들을 기반으로 각 프레임에 적용된 필터별 픽셀 변위를 추정하고, 추정한 픽셀 변위를 이용하여 프레임별 필터별 비선형도를 산출하는 단계;산출된 비선형도 값을 기설정된 기준값으로 분류하여 영상에서 미세 진동이 발생한 것으로 판단되는 영역(이하, '유효 픽셀' 이라함)을 선별하는 단계;선별된 유효 픽셀의 필터별 유효 진동값을 추출하고 최종 픽셀 변위를 추정하는 단계; 및상기 촬영된 영상을 구성하는 모든 픽셀에 대한 픽셀 변위 값을 추정하고, 추정된 픽셀 변위 값을 기반으로 진동 특성 값을 추출하여 진동 특징 맵을 생성하는 단계;를 포함하는 비선형 가중 필터를 활용하여 촬영된 영상의 진동 특징 맵을 생성하는 방법으로 생성되는 것을 특징으로 하는 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 방법. |
| 3 | 제 2 항에 있어서,상기 영상을 전처리하는 단계는 회색조(Grayscale), 가우시안 평활화(Gaussian Smoothing) 및 소벨 필터(Sobel Filter)를 수행하는 것을 특징으로 하는 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 방법. |
| 4 | 제 2 항에 있어서,상기 매개 변수는 위상 그래디언트, 위상차 및 필터 방향인 것을 특징으로 하는 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 방법. |
| 5 | 제 4 항에 있어서,상기 비선형도를 산출하는 단계:는각 프레임의 픽셀마다 필터별 위상차를 위상 그래디언트로 나눠 픽셀 변위를 도출하는 단계;모든 프레임의 위상 그래디언트를 평균한 값으로 필터별 각 프레임의 픽셀마다 위상차를 나눠 기준이 되는 픽셀 변위(이하, '기준 픽셀 변위'라 함)를 도출하는 단계;도출된 필터별 픽셀 변위와 상기 기준 픽셀 변위의 차를 구하고 상기 영상의 모든 프레임을 평균하여 필터별 비선형도를 산출하는 단계; 및산출된 비선형도의 역수값을 측정하는 가중 필터를 생성하여 비선형도 측정 신뢰도를 추정하는 단계;를 포함하는 것을 특징으로 하는 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 방법. |
| 6 | 제 5 항에 있어서,상기 유효 픽셀을 선별하는 단계:는 상기 영상의 모든 픽셀에서 기설정한 비선형도 기준값을 기준으로 산출된 필터별 비선형도 값이 상기 기준값 이상인 픽셀과 상기 기준값 이하인 픽셀로 분류하는 단계;상기 영상의 모든 픽셀에서 기설정한 기준응답값을 기준으로 각 픽셀에 적용된 필터의 응답값이 상기 기준응답값 이상인 픽셀과 상기 기준응답값 이하인 픽셀로 분류하는 단계; 및상기 영상의 모든 픽셀 중에서 상기 비선형도 기준값 이하인 픽셀이며, 상기 필터 기준응답값 이상인 픽셀을 유효 픽셀로 선별하는 단계;를 포함하는 것을 특징으로 하는 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 방법. |
| 7 | 제 6 항에 있어서,상기 최종 픽셀 변위를 추정하는 단계는 각 유효 픽셀에 적용되는 유효 필터 갯수에 따라 서로 다른 픽셀 변위 추정 방법을 사용하며,상기 유효 필터 갯수가 기준 갯수 이상이면 Intersection of Constrains(IOC) 기법을 사용해 최종 픽셀 변위를 추정하고,상기 유효 필터 갯수가 기준 갯수 이하이면 벡터 평균(Vector Average) 기법을 사용해 최종 픽셀 변위를 추정하는 것을 특징으로 하는 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 방법. |
| 8 | 제 2 항에 있어서,상기 진동 특성 값:은 Peak to Peak, Impulse factor, 형상 계수(Shape factor), 실효값(Root mean squared, RMS), 분산(Variance), 왜도(Skewness) 및 첨도(Kurtosis), 자동 회귀 계수(Autoregressive coefficient) 등을 이용하여 산출한 시간 영역의 특성 값; 및RVF(Root variance frequency), RMSF(Root mean squared frequency) 등을 이용하여 산출한 주파수 영역의 특성 값;을 포함하는 것을 특징으로 하는 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 방법. |
| 12 | 컴퓨터를 기능시켜 제 1 항 내지 제 11 항 중 어느 한 항의 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 방법을 수행하기 위한 기록 매체 저장된 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 컴퓨터 프로그램. |
| 13 | 제 12 항의 기록 매체 저장된 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 컴퓨터 프로그램이 저장된 서버. |
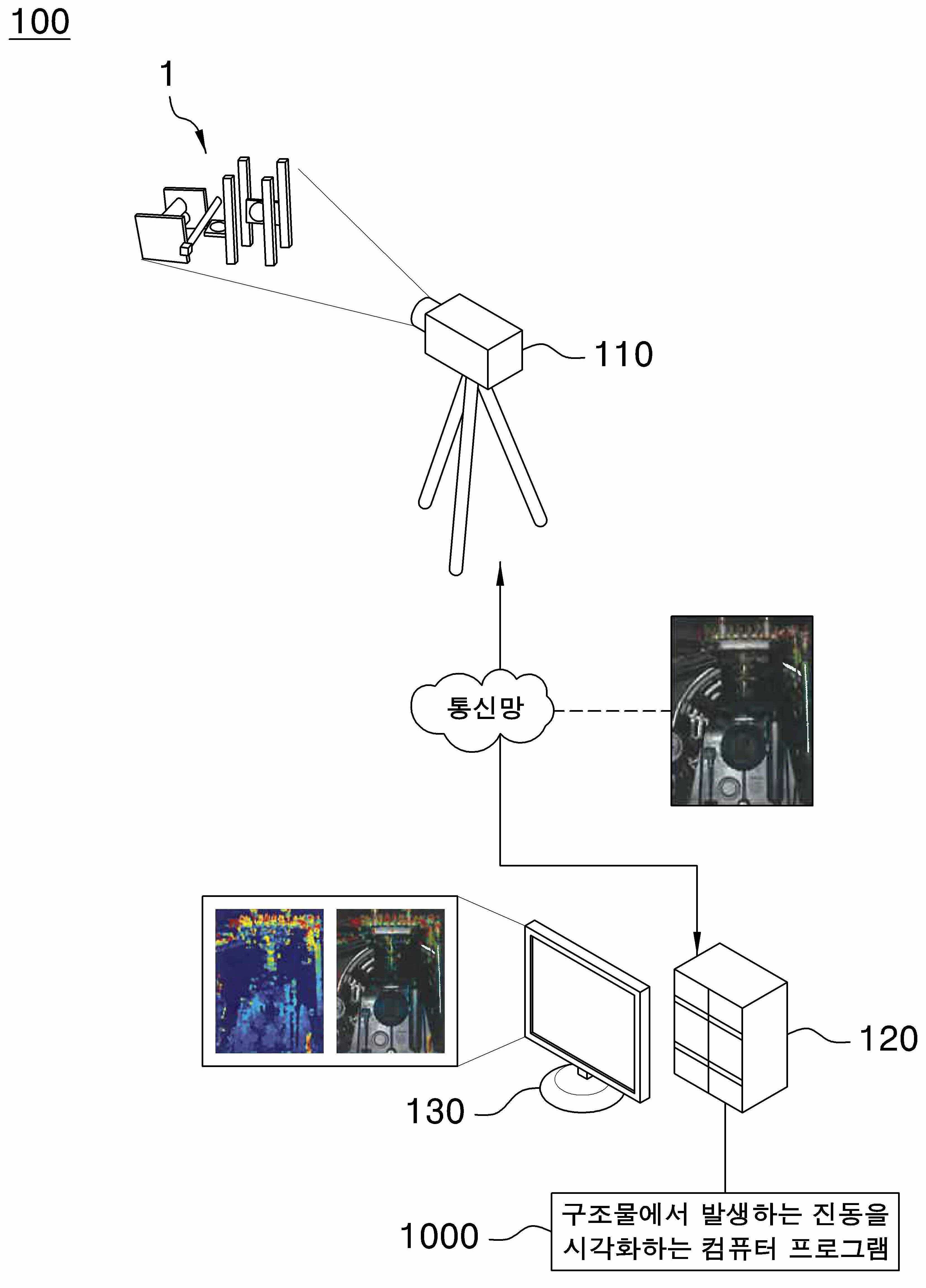
| 14 | 진동을 측정하고자 하는 구조물을 촬영하는 촬영 장치;상기 촬영 장치로부터 촬영한 영상을 수신받아 진동 특성 값을 산출하고 산출된 진동 특성 값을 기반으로 생성한 진동 특징 맵을 비교 분석한 후, 상기 촬영한 영상에서 진동이 발생한 영역을 시각화하여 제공하는 제 13 항의 서버; 및상기 서버를 통해 시각화된 데이터를 출력하는 표시 장치;를 포함하는 것을 특징으로 하는 비선형 가중 필터를 활용하여 생성된 진동 특징 맵을 기반으로 구조물에서 발생하는 진동을 시각화하는 시스템. |