| 번호 | 청구항 |
|---|---|
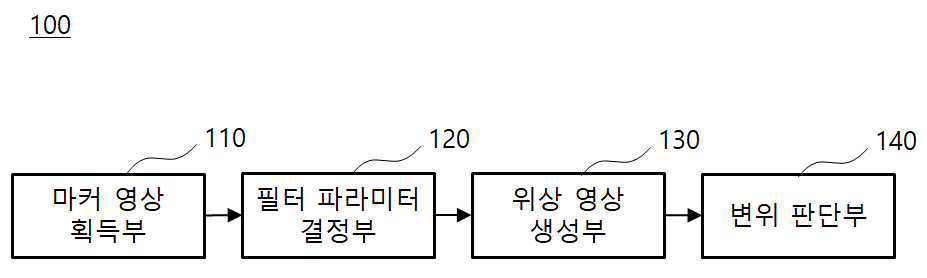
| 1 | 서로 직교하는 제1 직선 및 제2 직선으로 구성되며 구조물에 부착된 마커를 촬영한 마커 영상을 획득하는 마커 영상 획득부;상기 획득된 마커 영상을 분석하여 제1 가버 필터와 제2 가버 필터를 설계하는 필터 파라미터 결정부;상기 설계된 제1 가버 필터와 상기 설계된 제2 가버 필터를 이용하여 상기 획득된 마커 영상으로부터 제1 위상 영상 및 제2 위상 영상을 생성하는 위상 영상 생성부; 및상기 생성된 제1 위상 영상 및 상기 생성된 제2 위상 영상을 분석하여 상기 구조물의 변위를 판단하는 변위 판단부; 를 포함하되,상기 필터 파라미터 결정부는,상기 획득된 마커 영상에서 상기 제1 직선 및 상기 제2 직선을 식별하고, 상기 식별된 제1 직선을 기반으로 상기 제1 가버 필터의 파라미터를 결정하고, 상기 식별된 제2 직선을 기반으로 상기 제2 가버 필터의 파라미터를 결정하는,구조물의 변위 판단 장치. |
| 2 | 제1항에 있어서,상기 마커 영상 획득부는,상기 마커가 부착된 구조물을 촬영한 구조물 영상을 획득하고, 상기 획득된 구조물 영상에서 마커 영역을 인식하고 잘라내어 상기 마커 영상을 획득하는,구조물의 변위 판단 장치. |
| 3 | 삭제 |
| 4 | 제1항에 있어서,상기 파라미터는 가버 필터의 방향, 중심 주파수의 크기, 가우시안 엔벨로프의 각도 방향 표준편차 및 반지름 방향 표준편차를 포함하는,구조물의 변위 판단 장치. |
| 5 | 제4항에 있어서,상기 필터 파라미터 결정부는,상기 식별된 제1 직선의 방향과 수직한 방향을 상기 제1 가버 필터의 방향으로 결정하고, 상기 식별된 제2 직선의 방향과 수직한 방향을 상기 제2 가버 필터의 방향으로 결정하는,구조물의 변위 판단 장치. |
| 6 | 제4항에 있어서,상기 필터 파라미터 결정부는,상기 식별된 제1 직선의 너비를 기반으로 상기 제1 가버 필터의 중심 주파수의 크기, 가우시안 엔벨로프의 각도 방향 표준편차 및 반지름 방향 표준편차를 결정하고, 상기 식별된 제2 직선의 너비를 기반으로 상기 제2 가버 필터의 중심 주파수의 크기, 가우시안 엔벨로프의 각도 방향 표준편차 및 반지름 방향 표준편차를 결정하는,구조물의 변위 판단 장치. |
| 7 | 제6항에 있어서,상기 필터 파라미터 결정부는,하기 수학식을 이용하여 상기 제1 가버 필터 및 상기 제2 가버 필터의 중심 주파수의 크기를 결정하는,구조물의 변위 판단 장치.[수학식](여기서, (,)는 각 가버 필터의 중심 주파수, 는 각 가버 필터의 중심 주파수의 크기, 는 각 직선의 너비임) |
| 8 | 제6항에 있어서,상기 필터 파라미터 결정부는,하기 수학식을 이용하여 상기 제1 가버 필터 및 상기 제2 가버 필터의 가우시안 엔벨로프의 각도 방향 표준편차 및 반지름 방향 표준편차를 결정하는,구조물의 변위 판단 장치.[수학식](여기서, 는 각 직선의 너비, 는 각 가버 필터의 공간 영역(spatial domain)에서의 가우시안 엔벨로프의 각도 방향 표준편차, 는 각 가버 필터의 공간 영역에서의 가우시안 엔벨로프의 반지름 방향 표준편차, 는 각 가버 필터의 주파수 영역(frequency domain)에서의 가우시안 엔벨로프의 각도 방향 표준편차, 는 각 가버 필터의 주파수 영역에서의 가우시안 엔벨로프의 반지름 방향 표준편차임) |
| 9 | 제1항에 있어서,상기 변위 판단부는,POF(Phase-based optical flow) 기법을 이용하여 상기 구조물의 변위를 판단하는,구조물의 변위 판단 장치. |
| 10 | 제1항에 있어서,상기 변위 판단부는,상기 생성된 제1 위상 영상을 분석하여 제1 가버 필터 방향의 구조물 변위를 판단하고, 상기 생성된 제2 위상 영상을 분석하여 제2 가버 필터 방향의 구조물 변위를 판단하는,구조물의 변위 판단 장치. |
| 11 | 서로 직교하는 제1 직선 및 제2 직선으로 구성되며 구조물에 부착된 마커를 촬영한 마커 영상을 획득하는 단계;상기 획득된 마커 영상을 분석하여 제1 가버 필터와 제2 가버 필터를 설계하는 단계;상기 설계된 제1 가버 필터와 상기 설계된 제2 가버 필터를 이용하여 상기 획득된 마커 영상으로부터 제1 위상 영상 및 제2 위상 영상을 생성하는 단계; 및상기 생성된 제1 위상 영상 및 상기 생성된 제2 위상 영상을 분석하여 상기 구조물의 변위를 판단하는 단계; 를 포함하되,상기 제1 가버 필터와 제2 가버 필터를 설계하는 단계는,상기 획득된 마커 영상에서 상기 제1 직선 및 상기 제2 직선을 식별하는 단계;상기 식별된 제1 직선을 기반으로 상기 제1 가버 필터의 파라미터를 결정하는 단계; 및상기 식별된 제2 직선을 기반으로 상기 제2 가버 필터의 파라미터를 결정하는 단계; 를 포함하는,구조물의 변위 판단 방법. |
| 12 | 제11항에 있어서,상기 마커 영상을 획득하는 단계는,상기 마커가 부착된 구조물을 촬영한 구조물 영상을 획득하는 단계; 및상기 획득된 구조물 영상에서 마커 영역을 인식하고 잘라내어 상기 마커 영상을 획득하는 단계; 를 포함하는,구조물의 변위 판단 방법. |
| 13 | 삭제 |
| 14 | 제11항에 있어서,상기 파라미터는 가버 필터의 방향, 중심 주파수의 크기, 가우시안 엔벨로프의 각도 방향 표준편차 및 반지름 방향 표준편차를 포함하는,구조물의 변위 판단 방법. |
| 15 | 제14항에 있어서,상기 제1 가버 필터와 제2 가버 필터를 설계하는 단계는,상기 식별된 제1 직선의 방향과 수직한 방향을 상기 제1 가버 필터의 방향으로 결정하는 단계; 및상기 식별된 제2 직선의 방향과 수직한 방향을 상기 제2 가버 필터의 방향으로 결정하는 단계; 를 포함하는,구조물의 변위 판단 방법. |
| 16 | 제14항에 있어서,상기 제1 가버 필터와 제2 가버 필터를 설계하는 단계는,상기 식별된 제1 직선의 너비를 기반으로 상기 제1 가버 필터의 중심 주파수의 크기, 가우시안 엔벨로프의 각도 방향 표준편차 및 반지름 방향 표준편차를 결정하는 단계; 및상기 식별된 제2 직선의 너비를 기반으로 상기 제2 가버 필터의 중심 주파수의 크기, 가우시안 엔벨로프의 각도 방향 표준편차 및 반지름 방향 표준편차를 결정하는 단계; 를 포함하는,구조물의 변위 판단 방법. |
| 17 | 제16항에 있어서,상기 제1 가버 필터와 제2 가버 필터를 설계하는 단계는,하기 수학식을 이용하여 상기 제1 가버 필터 및 상기 제2 가버 필터의 중심 주파수의 크기를 결정하는,구조물의 변위 판단 방법.[수학식](여기서, (,)는 각 가버 필터의 중심 주파수, 는 각 가버 필터의 중심 주파수의 크기, 는 각 직선의 너비임) |
| 18 | 제16항에 있어서,상기 제1 가버 필터와 제2 가버 필터를 설계하는 단계는,하기 수학식을 이용하여 상기 제1 가버 필터 및 상기 제2 가버 필터의 가우시안 엔벨로프의 각도 방향 표준편차 및 반지름 방향 표준편차를 결정하는,구조물의 변위 판단 방법.[수학식](여기서, 는 각 직선의 너비, 는 각 가버 필터의 공간 영역(spatial domain)에서의 가우시안 엔벨로프의 각도 방향 표준편차, 는 각 가버 필터의 공간 영역에서의 가우시안 엔벨로프의 반지름 방향 표준편차, 는 각 가버 필터의 주파수 영역(frequency domain)에서의 가우시안 엔벨로프의 각도 방향 표준편차, 는 각 가버 필터의 주파수 영역에서의 가우시안 엔벨로프의 반지름 방향 표준편차임) |
| 19 | 제11항에 있어서,상기 구조물의 변위를 판단하는 단계는,POF(Phase-based optical flow) 기법을 이용하여 상기 구조물의 변위를 판단하는,구조물의 변위 판단 방법. |
| 20 | 제11항에 있어서,상기 구조물의 변위를 판단하는 단계는,상기 생성된 제1 위상 영상을 분석하여 제1 가버 필터 방향의 구조물 변위를 판단하는 단계; 및상기 생성된 제2 위상 영상을 분석하여 제2 가버 필터 방향의 구조물 변위를 판단하는 단계; 를 포함하는,구조물의 변위 판단 방법. |