| 번호 | 청구항 |
|---|---|
| 1 | UAV 위치, 각 지상 단말의 위치를 각각 획득하는 단계;상기 UAV 위치, 각 지상 단말의 위치 및 공통 속도를 기초로 n(n은 자연수)차원 상태를 정의한 후 강화 학습 기반 모델의 액터 및 크리틱 네트워크로 각각 입력하며, 상기 액터 네트워크의 출력을 기반으로 결합 동작을 선택하는 단계;상기 결합 동작의 값을 정책 제한 범위로 조정한 후 동작 형성 함수를 이용하여 재스케일링하는 단계; 및상기 스케일링된 결합 동작에 따른 보상을 적용하는 단계를 포함하되, 상기 보상은 달성 가능한 합계 속도인 것을 특징으로 하는 UAV 지원 RSMA 다운링크에서의 합계 속도 최대화 방법. |
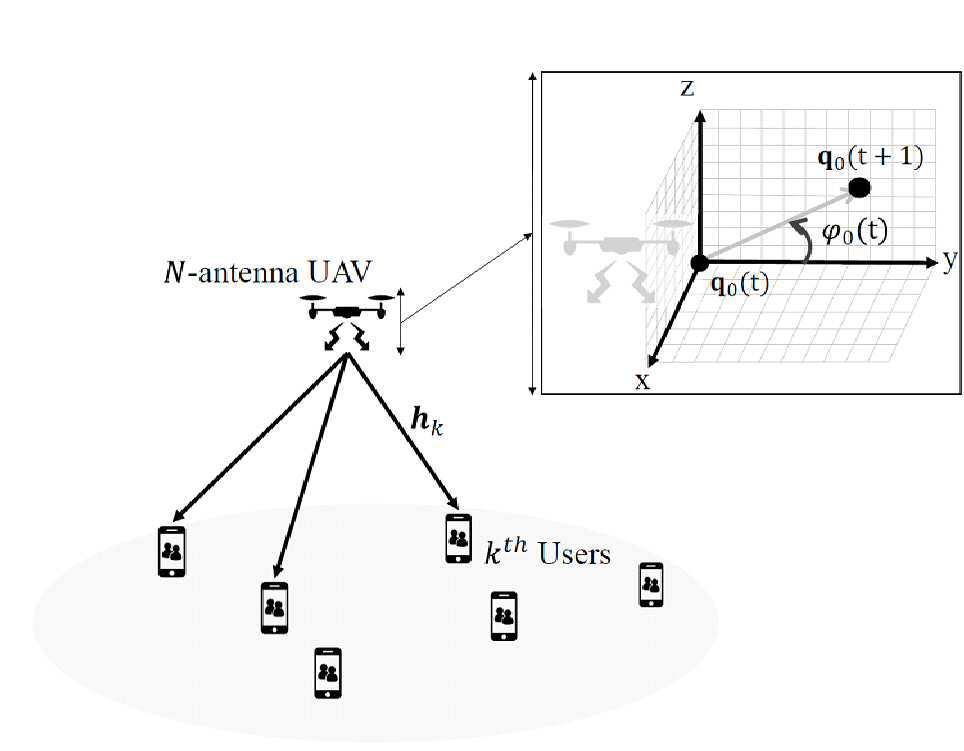
| 2 | 제1 항에 있어서, 상기 UAV의 고도는 고정되며, 좌우(x,y평면)로만 이동 가능한 것을 특징으로 하는 UAV 지원 RSMA 다운링크에서의 합계 속도 최대화 방법. |
| 3 | 제1 항에 있어서, 상기 결합 동작은 프리코딩 행렬, 공통 속도 벡터, 방향각 및 UAV 속도를 포함하는 것을 특징으로 하는 UAV 지원 RSMA 다운링크에서의 합계 속도 최대화 방법. |
| 4 | 제3 항에 있어서, 상기 프리코딩 행렬의 동작 형성 함수는 하기 수학식과 같은 것을 특징으로 하는 UAV 지원 RSMA 다운링크에서의 합계 속도 최대화 방법.여기서, 는 최대 전송 전력을 나타내고, 으로 신호대잡음비를 나타내며, 는 UAV 및 지상 단말을 나타내고, N은 안테나 개수를 나타내고, 는 빔포밍 벡터의 요소를 나타냄. |
| 5 | 제3 항에 있어서, 상기 공통 속도 벡터의 동작 형성 함수는 하기 수학식과 같은 것을 특징으로 하는 UAV 지원 RSMA 다운링크에서의 합계 속도 최대화 방법.여기서, 는 사용자별 속도 비율(ratio of rate for each user)를 나타내고, K는 단말의 개수를 나타내며, 는 단말 K의 공통 메시지를 성공적으로 복호화할 수 있는 전송률을 나타냄. |
| 6 | 제3 항에 있어서, 상기 UAV의 속도에 대한 동작 형성 함수는 하기 수학식과 같은 것을 특징으로 하는 UAV 지원 RSMA 다운링크에서의 합계 속도 최대화 방법.여기서, 는 UAV의 최대 속도를 나타내고, 는 정책 제한 범위로 조정된 속도의 값임. |
| 7 | 제3 항에 있어서, 상기 UAV의 방향각에 대한 동작 형성 함수는 하기 수학식과 같은 것을 특징으로 하는 UAV 지원 RSMA 다운링크에서의 합계 속도 최대화 방법.여기서, 는 정책 제한 범위로 조정된 방향값을 나타내고, 는 최대 방향각을 나타냄. |
| 8 | 제3 항에 있어서, 상기 보상은 하기 수학식으로 계산되는 것을 특징으로 하는 UAV 지원 RSMA 다운링크에서의 합계 속도 최대화 방법.여기서, 는 원하는 최대 속도를 나타내고, K는 단말의 개수를 나타냄. |
| 9 | 제1항 내지 제8 항 중 어느 하나의 항에 따른 방법을 수행하기 위한 프로그램 코드를 기록한 컴퓨터로 판독 가능한 기록매체. |
| 10 | 적어도 하나의 명령어를 저장하는 메모리; 및상기 메모리에 저장된 명령어를 실행하는 프로세서를 포함하되, 상기 프로세서에 의해 실행된 명령어는 각각,UAV 위치, 각 지상 단말의 위치를 각각 획득하는 단계;상기 UAV 위치, 각 지상 단말의 위치 및 공통 속도를 기초로 n(n은 자연수) 차원 상태를 정의한 후 강화 학습 기반 모델의 액터 및 크리틱 네트워크로 각각 입력하며, 상기 액터 네트워크의 출력과 정책을 기반으로 결합 동작을 결정하는 단계;상기 결합 동작의 값을 정책 제한 범위로 조정한 후 동작 형성 함수를 이용하여 스케일링하는 단계; 및상기 스케일링된 결합 동작에 따른 보상을 적용하는 단계를 수행하되, 상기 보상은 달성 가능한 합계 속도인 것을 특징으로 하는 UAV 지원 RSMA 다운링크에서의 합계 속도 최대화 장치. |
| 11 | 제10 항에 있어서, 상기 UAV는 고도가 고정되며, 좌우(x,y) 평면상에서만 이동 및 호버링되는 것을 특징으로 하는 UAV 지원 RSMA 다운링크에서의 합계 속도 최대화 장치. |
| 12 | 복수의 지상 단말;상기 복수의 지상 단말에 신호를 전송하기 위해 이동 및 호버링하는 UAV; 및상기 지상 단말 및 상기 UAV의 위치 및 공통 속도를 기초로 n(n은 자연수) 차원 상태를 정의한 후 달성 가능한 합계 속도 최대화를 위한 제한 조건들을 결합 동작으로 정의한 후 강화 학습 기반 모델을 통해 보상을 최대로 하는 상기 n차원 상태에 따른 결합 동작을 결정하는 에이전트를 포함하되,상기 결합 동작은 정책 제한 범위로 조정된 후 동작 형성 함수를 이용하여 스케일링되되,상기 보상은 달성 가능한 합계 속도인 것을 특징으로 하는 시스템. |
| 13 | 제12 항에 있어서, 상기 결합 동작은 프리코딩 행렬 단위 동작, 공통 속도 벡터 단위 동작, 방향각 단위 동작 및 UAV 속도 단위 동작을 포함하는 것을 특징으로 하는 시스템. |