| 번호 | 청구항 |
|---|---|
| 1 | 로봇의 카메라를 통해 획득한 지면 영상에서 지면의 특징을 획득하는 특징 획득부;상기 획득한 지면의 특징 중에서 기 정해진 조건을 만족하는 두드러진 지면의 특징을 검출하는 주요 지면특징 검출부;상기 두드러진 지면 특징을 루프 팩터로 사용하기 위해 가공하는 특징 가공부; 및로봇이 동일한 두드러진 지면 특징이 있는 영역을 재방문할 경우 상기 가공된 지면 특징에서 루프 팩터를 산출하여 루프 클로징을 수행하는 루프 클로징 수행부를 포함하는 자율주행 로봇의 지면 표식 기반 위치인식 시스템. |
| 2 | 제 1 항에 있어서,상기 특징 획득부는, 역 원근 매핑(Inverse Perspective Mapping, IPM) 방식을 사용하여 지면의 특징을 획득하는 자율주행 로봇의 지면 표식 기반 위치인식 시스템. |
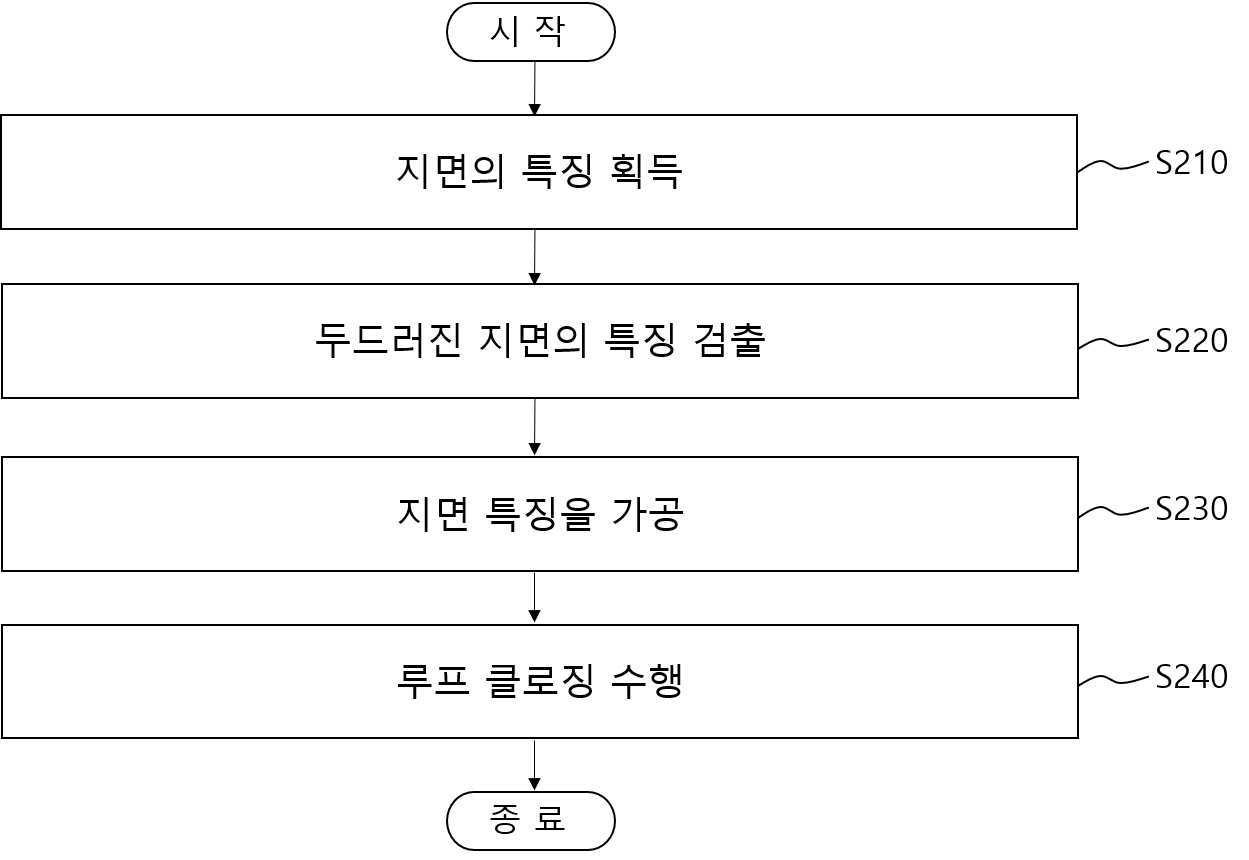
| 3 | 로봇의 카메라를 통해 획득한 지면 영상에서 지면의 특징을 획득하는 단계;상기 획득한 지면의 특징 중에서 기 정해진 조건을 만족하는 두드러진 지면의 특징을 검출하는 단계;상기 두드러진 지면 특징을 루프 팩터로 사용하기 위해 가공하는 단계; 및로봇이 동일한 두드러진 지면 특징이 있는 영역을 재방문할 경우 상기 가공된 지면 특징에서 루프 팩터를 산출하여 루프 클로징을 수행하는 단계를 포함하는 자율주행 로봇의 지면 표식 기반 위치인식 방법. |
| 4 | 제 3 항에 있어서,상기 지면의 특징을 획득하는 단계는, MC-IPM을 사용하여 지면의 특징을 획득하는 자율주행 로봇의 지면 표식 기반 위치인식 방법. |
| 5 | 제 4 항에 있어서,상기 MC-IPM은, 상기 지면 영상을 포즈 간의 롤과 피치의 차이를 이용하여 보정하는 자율주행 로봇의 지면 표식 기반 위치인식 방법. |
| 6 | 제 3 항에 있어서,상기 두드러진 지면의 특징을 검출하는 단계는, SOD 네트워크와 도로 표시를 부분적으로 혼합하여 설계된 훈련 세트를 사용하여 훈련시킨 네트워크를 사용하는 자율주행 로봇의 지면 표식 기반 위치인식 방법. |
| 7 | 제 3 항에 있어서,상기 두드러진 지면 특징을 루프 팩터로 사용하기 위해 가공하는 단계는, 상기 검출된 두드러진 지면 특징의 영역을 3D 공간으로 추출하는 단계;상기 두드러진 지면 특징 포인트에 대한 복셀화를 수행하는 단계;상기 두드러진 지면 특징 포인트에 대한 디스크립터를 생성하는 단계;온라인 클러스트링을 통해 상기 두드러진 지면 특징 포인트에 대한 디스크립터를 복수의 특징으로 그룹화하는 단계; 및쿼리 두드러진 지면 특징 포인트 디스크립터를 결정하고 쿼리 두드러진 지면 특징 포인트 디스크립터를 이전 두드러진 지면 특징 그룹의 디스크립터 및 코사인 거리와 열 이동(column shifting)을 사용하여 가장 가까운 그룹에 할당하는 단계를 포함하는 자율주행 로봇의 지면 표식 기반 위치인식 방법. |