| 번호 | 청구항 |
|---|---|
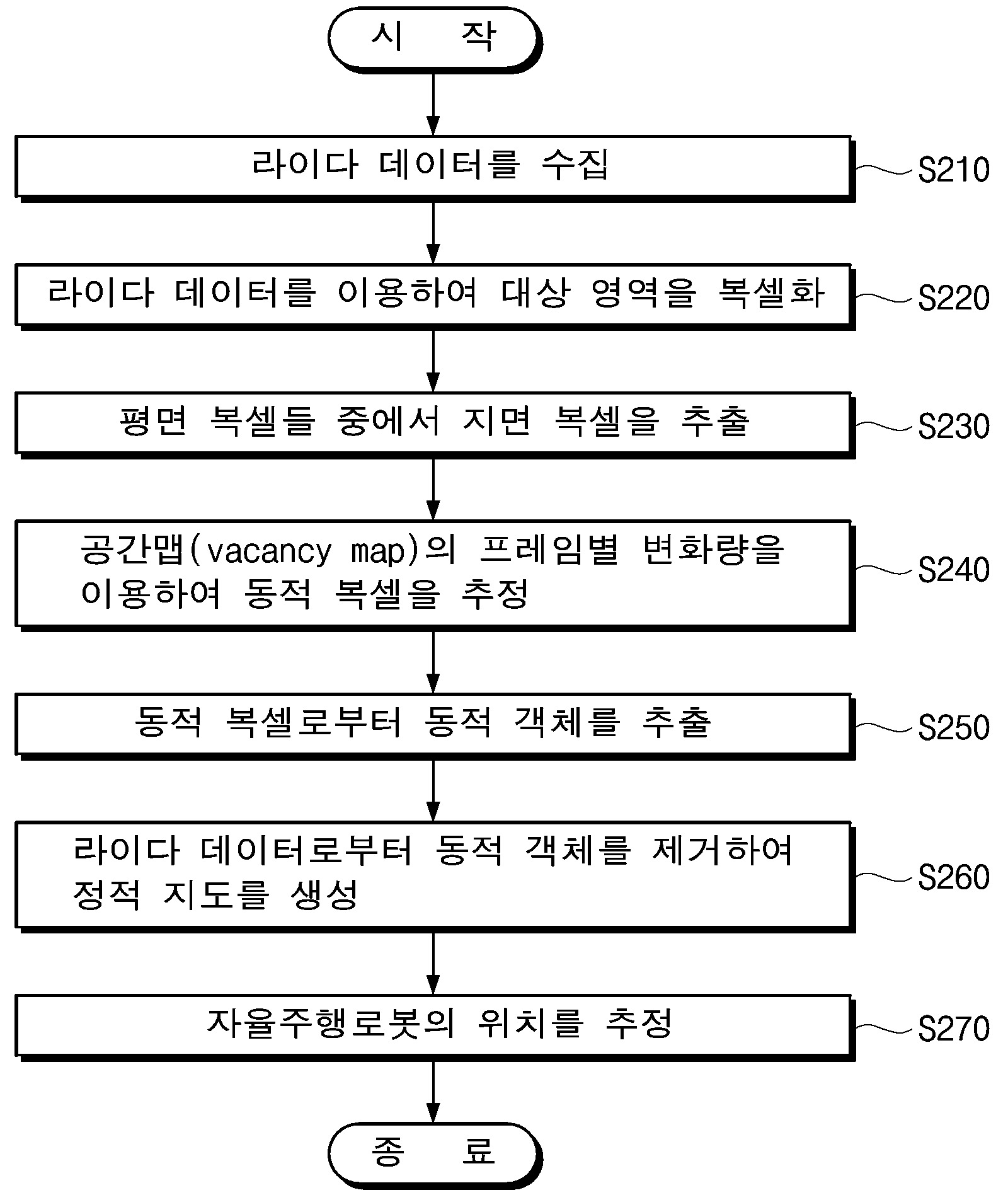
| 1 | 자율주행을 위한 정적 지도 생성 장치에서 수행되는 정적 지도 생성 방법에 있어서,대상 영역을 주행하는 자율주행로봇에 장착된 라이다 센서를 통하여 주변을 스캐닝한 라이다 데이터를 획득하는 단계,상기 라이다 데이터를 이용하여 대상 영역을 복셀화 하는 단계, 모든 3차원 복셀들에 대하여 PCA 알고리즘을 적용하여 평면으로 추정되는 복셀들을 선별하고, 평면 복셀들 중에서 지면 복셀을 추출하는 단계,지면 복셀을 기준으로 상측의 빈 공간에 대한 공간맵(vacancy map)의 프레임별 변화량을 이용하여 동적 복셀을 추정하는 단계, 상기 추정된 동적 복셀로부터 동적 객체를 추출하는 단계, 그리고 상기 라이다 데이터로부터 동적 객체를 제거하여 정적 지도를 생성하는 단계를 포함하는 정적 지도 생성 방법. |
| 2 | 청구항 1에 있어서,상기 정적 지도와 라이다 데이터를 이용하여 상기 자율주행로봇의 위치를 추정하는 단계를 더 포함하는 정적 지도 생성 방법. |
| 3 | 청구항 1에 있어서,상기 지면 복셀을 추출하는 단계는,평면 복셀들 중에서 노멀 벡터(normal vector)가 지상을 향하는 복셀들을 지면 복셀로 결정하는 정적 지도 생성 방법. |
| 4 | 청구항 1에 있어서,상기 동적 복셀을 추정하는 단계는,상기 지면 복셀과 상기 지면 복셀을 제외한 가장 낮은 포인트 지점 사이에 존재하는 복셀의 개수를 이용하여 공간 스코어(vacancy score)를 산출하는 단계,상기 공간 스코어를 이용하여 3차원 복셀에 대한 공간 맵을 생성하는 단계, 그리고프레임 별 공간 맵의 변화량이 기준값보다 큰 복셀을 동적 복셀로 추정하는 단계를 포함하는 정적 지도 생성 방법. |
| 5 | 청구항 4에 있어서,상기 추정된 동적 복셀로부터 동적 객체를 추출하는 단계는, 상기 동적 복셀로 추정된 영역을 더 작은 크기의 복셀들로 분할하는 단계, 그리고 분할된 복셀들에 대한 공간 맵의 변화량을 이용하여 최종적으로 동적 객체를 추정하는 단계를 포함하는 정적 지도 생성 방법. |
| 6 | 자율주행을 위한 정적 지도 생성 장치에 있어서,대상 영역을 주행하는 자율주행로봇에 장착된 라이다 센서를 통하여 주변을 스캐닝하여 라이다 데이터를 획득하는 데이터 수집부, 상기 라이다 데이터를 이용하여 대상 영역을 복셀화 하는 복셀화부, 모든 3차원 복셀들에 대하여 PCA 알고리즘을 적용하여 평면으로 추정되는 복셀들을 선별하고, 평면 복셀들 중에서 지면 복셀을 추출하는 지면 복셀 추출부,지면 복셀을 기준으로 상측의 빈 공간에 대한 공간맵(vacancy map)의 프레임별 변화량을 이용하여 동적 복셀을 추정하고, 상기 추정된 동적 복셀로부터 동적 객체를 추출하는 동적 객체 추출부, 그리고 상기 라이다 데이터로부터 동적 객체를 제거하여 정적 지도를 생성하는 정적 지도 생성부를 포함하는 정적 지도 생성 장치. |
| 7 | 청구항 6에 있어서,상기 정적 지도와 라이다 데이터를 이용하여 상기 자율주행로봇의 위치를 추정하는 위치 추정부를 더 포함하는 정적 지도 생성 장치. |
| 8 | 청구항 6에 있어서,상기 지면 복셀 추출부는,평면 복셀들 중에서 노멀 벡터(normal vector)가 지상을 향하는 복셀들을 지면 복셀로 결정하는 정적 지도 생성 장치. |
| 9 | 청구항 6에 있어서,상기 동적 객체 추출부는,상기 지면 복셀과 상기 지면 복셀을 제외한 가장 낮은 포인트 지점 사이에 존재하는 복셀의 개수를 이용하여 공간 스코어(vacancy score)를 산출하고, 상기 공간 스코어를 이용하여 3차원 복셀에 대한 공간 맵을 생성하며, 프레임 별 공간 맵의 변화량이 기준값보다 큰 복셀을 동적 복셀로 추정하는 정적 지도 생성 장치. |
| 10 | 청구항 9에 있어서,상기 동적 객체 추출부는,상기 동적 복셀로 추정된 영역을 더 작은 크기의 복셀들로 분할하고,분할된 복셀들에 대한 공간 맵의 변화량을 이용하여 최종적으로 동적 객체를 추정하는 정적 지도 생성 장치. |