| 번호 | 청구항 |
|---|---|
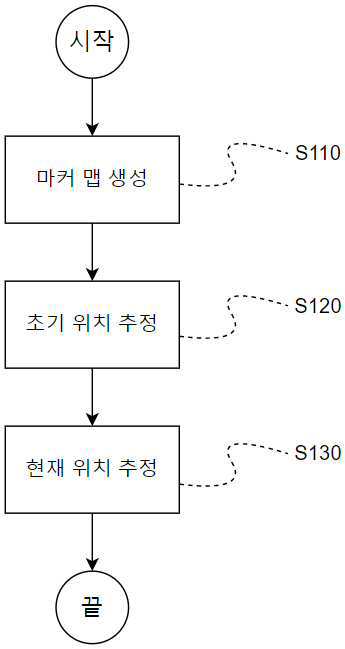
| 1 | 로봇의 사전 주행을 통해 관측한 주위 환경 정보를 기초로 마커 맵을 생성하는 단계;로봇에 구비된 카메라 센서와 LiDAR 센서를 통해 측정한 정보를 이용하여 상기 마커 맵 상에서의 상기 로봇의 초기 위치를 추정하는 단계; 및상기 LiDAR 센서 및 상기 카메라 센서를 통해 측정한 정보를 이용하여 재귀적으로 상기 로봇의 현재 위치를 추정하는 단계를 포함하는 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |
| 2 | 제 1 항에 있어서,상기 마커 맵을 생성하는 단계는,점유 격자 지도 작성기반 맵핑과 EKF SLAM(Extended Kalman Filter Simultaneous Localization and Mapping) 알고리즘을 사용하여 격자 지도와 공유 가능한 상기 마커 맵을 생성하는 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |
| 3 | 제 2 항에 있어서,상기 EKF SLAM의 상태 백터(state vector)는, 에서의 로봇의 위치와 N개의 마커 맵 로 구성되고, 하기의 수학식으로 나타내는 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |
| 4 | 제 3 항에 있어서,상기 마커 맵을 생성하는 단계는,하기의 수학식과 같이 초기 공분산 의 로봇 위치 공분산을 0으로 초기화하는 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |
| 5 | 제 1 항에 있어서,상기 마커 맵을 생성하는 단계는,추정 과정을 진행하기 위한 관측 값를 하기의 수학과 같이 정의하고, 은 로봇 좌표계를 기준으로 하는 좌표를 의미하는 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |
| 6 | 제 5 항에 있어서,상기 관측 값는,하기의 수학식을 통하여 생성된 관측 모델을 이용하여 추정 과정에서 사용될 예측 값 로 변환하고, 이 때, 과 는 로봇 좌표계로부터 마커 포인트까지의좌표를,는 로봇의 헤드와 관측된 마커 헤드의 각도 간의 차를 의미하는 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |
| 7 | 제 2 항에 있어서,상기 EKF SLAM은,하기의 수학식을 거쳐 마커의 위치를 보정하는 과정을 진행하고, 와는 각각 센서 노이즈의 공분산과 칼만 게인을 의미하고, 공분산 은 시간 에서의 각 마커 간의 상관관계를 의미하며, 전체 공분산은 이외의 공분산 요소는 영행렬로 구성되는 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |
| 8 | 제 1 항에 있어서,상기 로봇의 초기 위치를 추정하는 단계는, 하기 수학식과 같이, 초기 의 로봇의 위치에 대한 공분산을 로, 마커 위치에 대한 공분산을 0으로 하는 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |
| 9 | 제 1 항에 있어서,상기 로봇의 초기 위치를 추정하는 단계는, 로봇의 초기 위치를 추정하기 위해 상기 마커 맵을 사용하며. 추정되지 않은 초기 위치 는 으로 설정하고, 마커 맵 은 마커 맵을 생성하는 단계의 결과물을 사용하고, 시간 와 독립적이며, 마커가 관측되었을 때, 관측 값를 바탕으로 보정 과정을 실행하여 초기 위치를 추정하는 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |
| 10 | 제 1 항에 있어서,상기 로봇의 현재 위치를 추정하는 단계는,초기 위치를 추정하는 단계에서의 추정된 초기 위치를 기초로 재귀적으로 로봇의 위치를 추정하며, 해당 단계의 예측 상태 백터의 는 LiDAR 위치 인식의 결과을 사용하고, 은 초기값과 동일한 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |
| 11 | 제 1 항에 있어서,상기 로봇의 현재 위치를 추정하는 단계는,EKF 위치인식 과정을 나타내는 수식인 하기의 수학식을 통하여 위치를 인식하는 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |
| 12 | 제 1 항에 있어서,상기 로봇의 현재 위치를 추정하는 단계는,EKF 알고리즘을 통해 보정된 로봇의 위치를 계산하며 마커 위치인식으로부터 도출된 결과인 상태 백터와 공분산은 하기의 수학식을 통하여 정의되는 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |
| 13 | 제 1 항에 있어서,상기 로봇의 현재 위치를 추정하는 단계는,마커 위치인식의 위치 추정 결과를 LiDAR 위치인식에 전달하여 로봇의 위치를 다시 보정하는 재귀 형태로 구축되는 형태의 실내 물류 환경에서 라이다-카메라 약결합 기반 맵핑 및 위치인식 방법. |