| 번호 | 청구항 |
|---|---|
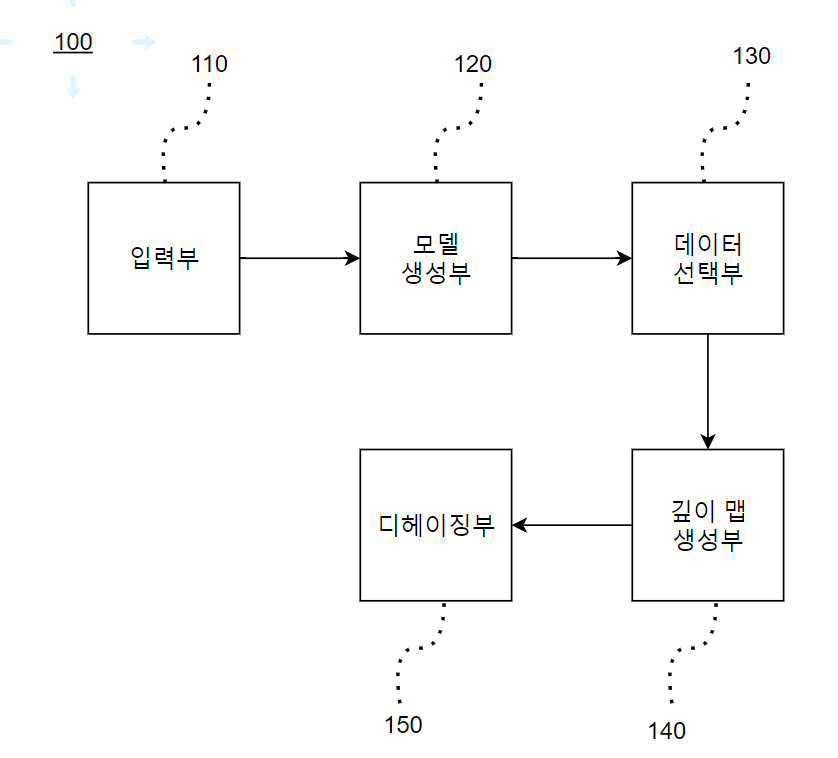
| 1 | 영상을 입력받는 입력부;상기 입력부에서 입력 받은 영상에 대한 초기 깊이 정보 추정을 위한 그람 행렬을 생성하고 증분 가우시안 프로세스(Incremental Gaussian Processes, IGP)를 구성하는 모델 생성부;상기 모델 생성부에서 기존의 입력 데이터와 추가된 입력 데이터 사이의 차이가 최대인 데이터를 선택하는 데이터 선택부;상기 데이터 선택부에서 선택된 데이터를 이용하여 상기 IGP을 업데이트하고 업데이트된 상기 IGP에 의해 고밀도 깊이 맵을 생성하는 깊이 맵 생성부; 및상기 고밀도 깊이 맵을 기반으로 상기 입력받은 영상에 대한 디헤이징을 수행하는 디헤이징부를 포함하고,상기 가우시안 프로세스는,평균함수 와 공분산 함수 로 정의되며, 이 때, 와 는 데이터 샘플을 의미하고,상기 공분산 함수는,신경망과 제곱 지수(squared exponential, SE) 커널의 혼합으로 수학식과 같이 정의되고, 와 는 SE의 하이퍼파라미터이며, 는 증강 입력 벡터이고, 이고,상기 모델 생성부는,상기 그람 행렬에 기븐스 회전 기반의 QR분해를 적용하여 상기 그람 행렬의 역행렬을 수학식 에 따라 계산하고 , 상기 행렬 의 분해 행렬은 및 이며,상기 깊이 맵 생성부는,수학식 을 사용하여 를 계산하여 두 연속시간 단계 t 와 t-1 사이의 델타를 구하고 와 을 비교하여 t단계의 증분량이 이전 단계의 특정 비율() 이하로 떨어지면 학습을 중지하는 센서 융합을 통한 영상 디헤이징 시스템. |
| 2 | 삭제 |
| 3 | 제 1 항에 있어서,상기 공분산 함수는,고정 및 비고정 커널 함수를 모두 사용하여 커널을 구성하는 영상 디헤이징 시스템. |
| 4 | 삭제 |
| 5 | 삭제 |
| 6 | 삭제 |
| 7 | 제 1 항에 있어서,상기 디헤이징부는,상기 고밀도 깊이 맵을 통하여 디헤이징된 이미지를 재구성하고 화이트 밸런스를 수행하여 편향된 색상을 복원하는 센서 융합을 통한 영상 디헤이징 시스템. |