| 번호 | 청구항 |
|---|---|
| 3 | 제1항에 있어서,상기 CAF 알고리즘은 다음의 수학식 1에 따라 연산되는 것을 특징으로 하는 미식별 비콘 위치 추정 시스템.[수학식 1](여기서 은 1번 안테나에서 수신한 신호, 는 2번 안테나에서 수신한 신호, 는 두 신호간 신호 지연 시간, 는 두 신호의 주파수 차이, 적산 시간을 나타낸다.) |
| 4 | 삭제 |
| 5 | 삭제 |
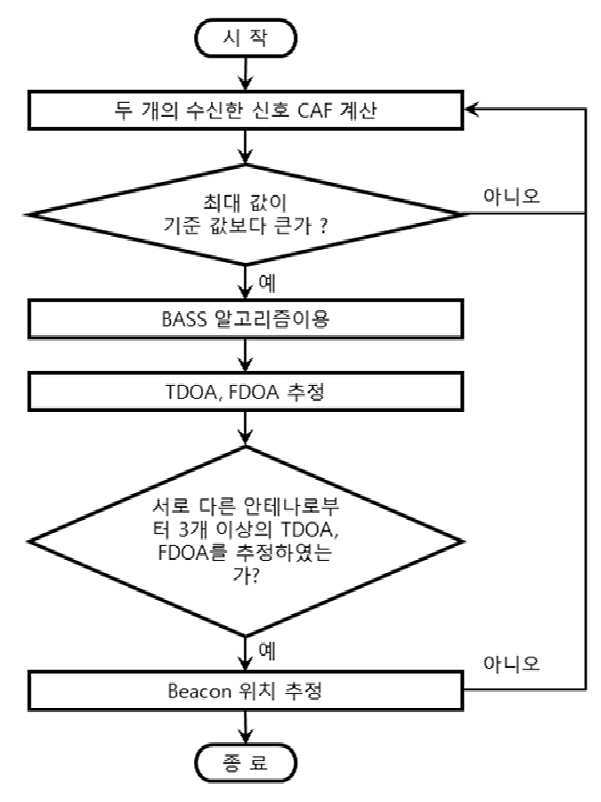
| 1 | 미식별 비콘의 신호를 수신하는 수신부;수신한 상기 신호를 연산하고, 연산값을 이용해 비콘 구조신호의 유무 및 유사성을 확인하는 연산부; 및상기 연산값을 이용해 상기 미식별 비콘의 위치를 추정하는 위치추정부;를 포함하되,상기 연산부는, 주기적으로 상기 신호를 CAF(Cross Ambiguity Function) 알고리즘으로 연산하고,상기 위치추정부는,상기 CAF 알고리즘으로 연산한 결과값을 이용해 TDOA(Time Difference of Arrival)와 FDOA(Frequency Difference of Arrival)를 추정하고,하기 수학식 2를 이용해 상기 TDOA를 보정하는 미식별 비콘 위치 추정 시스템.[수학식 2](여기서, x는 misalignment의 값, 는 sample간 시간, r은 CAF를 통하여 계산한 최고 값의 전 후의 비율을 나타낸다.) |
| 2 | 삭제 |
| 6 | 미식별 비콘의 신호를 수신하는 단계;수신한 상기 신호를 연산하고, 연산값을 이용해 비콘 구조신호의 유무 및 유사성을 확인하는 연산 단계; 및상기 연산값을 이용해 상기 미식별 비콘의 위치를 추정하는 단계;를 포함하되,상기 연산 단계는, 주기적으로 상기 신호를 CAF(Cross Ambiguity Function) 알고리즘으로 연산하고, 상기 위치 추정 단계는,상기 CAF 알고리즘으로 연산한 결과값을 이용해 TDOA(Time Difference of Arrival)와 FDOA(Frequency Difference of Arrival)를 추정하며,하기 수학식 2를 이용해 상기 TDOA를 보정하는 미식별 비콘 위치 추정 방법.[수학식 2](여기서, x는 misalignment의 값, 는 sample간 시간, r은 CAF를 통하여 계산한 최고 값의 전 후의 비율을 나타낸다.) |
| 7 | 삭제 |
| 8 | 제6항에 있어서,상기 CAF 알고리즘은 다음의 수학식 1에 따라 연산되는 것을 특징으로 하는 미식별 비콘 위치 추정 방법.[수학식 1](여기서 은 1번 안테나에서 수신한 신호, 는 2번 안테나에서 수신한 신호, 는 두 신호간 신호 지연 시간, 는 두 신호의 주파수 차이, 적산 시간을 나타낸다.) |
| 9 | 삭제 |
| 10 | 삭제 |