| 번호 | 청구항 |
|---|---|
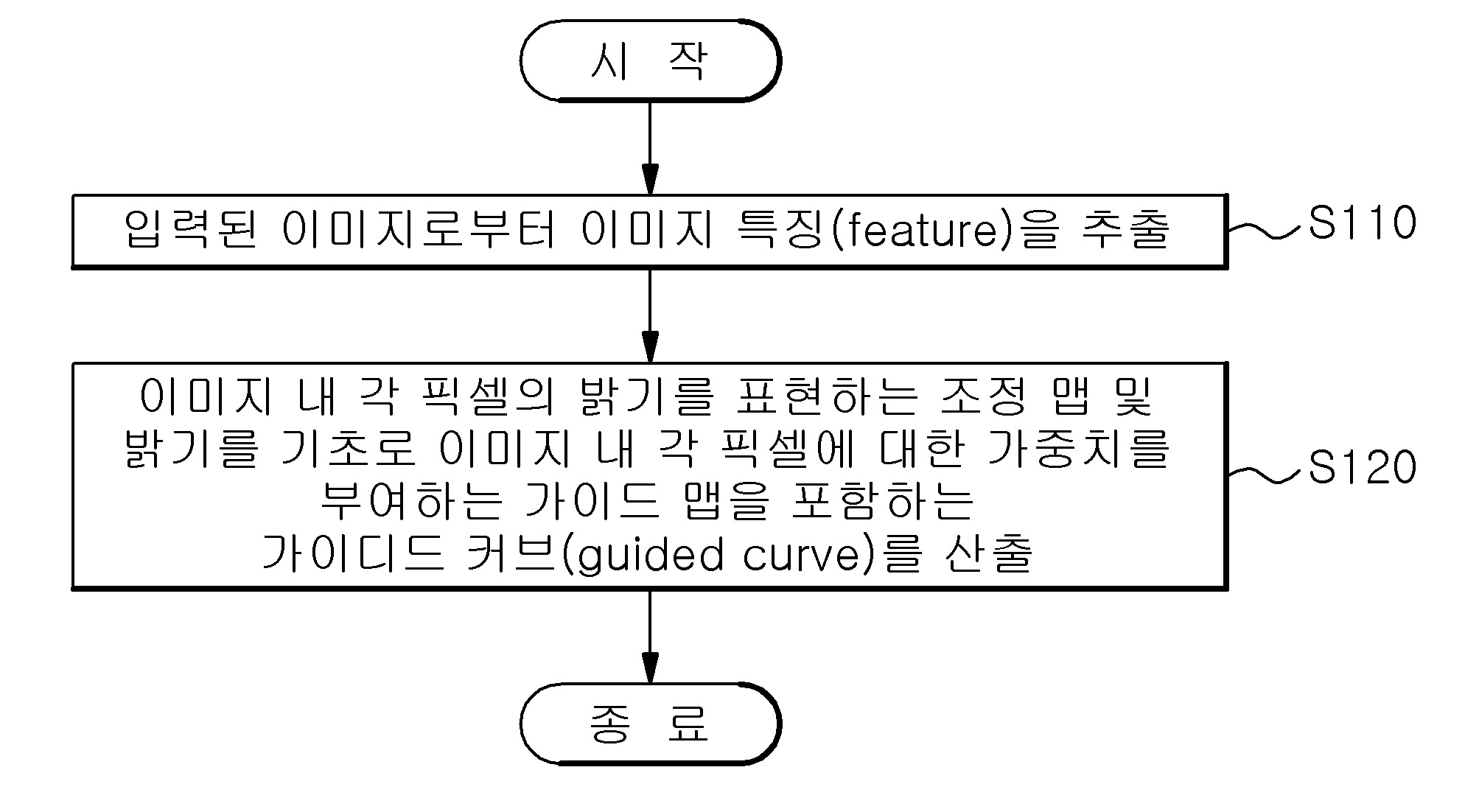
| 1 | 인코더 및 디코더를 포함하는 가이디드 커브 추정 모델에 의해 수행되는 저조명도 영상 개선을 위한 가이디드 커브 추정 방법에 있어서,상기 인코더를 이용하여 입력된 이미지로부터 이미지 특징(feature)을 추출하는 단계; 및상기 이미지 특징을 상기 디코더에 입력하여 상기 이미지 내 각 픽셀의 밝기를 표현하는 조정 맵 및 상기 밝기를 기초로 상기 이미지 내 각 픽셀에 대한 가중치를 부여하는 가이드 맵을 포함하는 가이디드 커브(guided curve)를 산출하는 단계를 포함하는,저조명도 영상 개선을 위한 가이디드 커브 추정 방법. |
| 2 | 제1항에 있어서,상기 가이디드 커브를 산출하는 단계는,상기 이미지 특징을 제1 디코더에 입력하여 상기 이미지 내 각 픽셀의 현재 밝기를 표현하는 조정 맵을 출력하는 단계; 및상기 이미지 특징을 제2 디코더에 입력하여 상기 이미지 내 각 픽셀의 현재 밝기에 대한 가중치를 부여하는 가이드 맵을 출력하는 단계를 포함하는,저조명도 영상 개선을 위한 가이디드 커브 추정 방법. |
| 3 | 제2항에 있어서,상기 조정 맵은,레드, 그린 및 블루의 3개 채널을 포함하는,저조명도 영상 개선을 위한 가이디드 커브 추정 방법. |
| 4 | 제2항에 있어서,상기 가이드 맵을 출력하는 단계에서,상기 이미지 내 픽셀의 현재 밝기가 어두울수록 더 높은 가중치를 부여하는,저조명도 영상 개선을 위한 가이디드 커브 추정 방법. |
| 5 | 제2항에 있어서,상기 가이드 맵을 출력하는 단계에서,상기 이미지 내 픽셀의 현재 밝기가 임계값 이상이면 가중치를 0으로 부여하는,저조명도 영상 개선을 위한 가이디드 커브 추정 방법. |
| 6 | 제5항에 있어서,상기 임계값은,상기 가이디드 커브 추정 모델의 학습을 통해 결정된 것인,저조명도 영상 개선을 위한 가이디드 커브 추정 방법. |
| 7 | 제1항에 있어서,상기 가이디드 커브를 상기 이미지에 적용하여 상기 이미지의 각 픽셀에 대한 밝기가 조정된 조정 이미지를 출력하는 단계를 더 포함하는,저조명도 영상 개선을 위한 가이디드 커브 추정 방법. |
| 8 | 제7항에 있어서,상기 가이디드 커브 추정 모델은,상기 이미지 및 상기 조정 이미지에 대한 각 픽셀의 밝기 차이를 반영하여 산출된 손실함수를 기초로 기 학습된 것인,저조명도 영상 개선을 위한 가이디드 커브 추정 방법. |
| 9 | 제8항에 있어서,상기 손실함수는 채널 일관성 손실함수를 포함하고,상기 채널 일관성 손실함수는, 로 결정되고, 는 상기 채널 일관성 손실함수, KL은 두 분포 사이의 차이를 수치적으로 나타낸 값, 는 상기 조정 이미지, 는 상기 이미지를 나타내는,저조명도 영상 개선을 위한 가이디드 커브 추정 방법. |
| 10 | 제8항에 있어서,상기 손실함수는 엣지 일관성 손실함수를 포함하고,상기 엣지 일관성 손실함수는,로 결정되고, 는 상기 엣지 일관성 손실함수, Y는 상기 조정 이미지, 는 임의의 상수인,저조명도 영상 개선을 위한 가이디드 커브 추정 방법. |
| 11 | 제8항에 있어서,상기 손실함수는 밝기 일관성 손실함수를 포함하고,상기 밝기 일관성 손실함수는,로 결정되고, 는 상기 밝기 일관성 손실함수, 는 HSV(hue, saturation, value) 색공간 형식으로 된 영상 I의 명도(V, value) 채널, 는 밝기 맵()의 곡률을 조정하는 변수인,저조명도 영상 개선을 위한 가이디드 커브 추정 방법. |
| 12 | 컴퓨터 실행 가능한 명령어를 저장할 수 있는 메모리; 및상기 명령어를 실행함으로써,인코더를 이용하여 입력된 이미지로부터 이미지 특징(feature)을 추출하는 단계;상기 이미지 특징을 디코더에 입력하여 상기 이미지 내 각 픽셀의 밝기를 표현하는 조정 맵 및 상기 밝기를 기초로 상기 이미지 내 각 픽셀에 대한 가중치를 부여하는 가이드 맵을 포함하는 가이디드 커브(guided curve)를 산출하는 단계를 포함하는 방법을 수행하는 프로세서를 포함하는,저조명도 영상 개선을 위한 가이디드 커브 추정 장치. |
| 13 | 제12항에 있어서,상기 가이디드 커브를 산출하는 단계는,상기 이미지 특징을 제1 디코더에 입력하여 상기 이미지 내 각 픽셀의 밝기를 표현하는 조정 맵을 출력하는 단계; 및상기 이미지 특징을 제2 디코더에 입력하여 상기 이미지 내 각 픽셀의 밝기에 대한 가중치를 부여하는 가이드 맵을 출력하는 단계를 포함하는,저조명도 영상 개선을 위한 가이디드 커브 추정 장치. |
| 14 | 제13항에 있어서,상기 조정 맵은,레드, 그린 및 블루의 3개 채널을 포함하는,저조명도 영상 개선을 위한 가이디드 커브 추정 장치. |
| 15 | 제13항에 있어서,상기 가이드 맵을 출력하는 단계에서,상기 이미지 내 픽셀의 밝기가 어두울수록 더 높은 가중치를 부여하는,저조명도 영상 개선을 위한 가이디드 커브 추정 장치. |
| 16 | 제13항에 있어서,상기 가이드 맵을 출력하는 단계에서,상기 이미지 내 픽셀의 밝기가 임계값 이상이면 가중치를 0으로 부여하는,저조명도 영상 개선을 위한 가이디드 커브 추정 장치. |
| 17 | 제16항에 있어서,상기 임계값은,상기 가이디드 커브 추정 모델의 학습을 통해 결정된 것인,저조명도 영상 개선을 위한 가이디드 커브 추정 장치. |
| 18 | 제12항에 있어서,상기 방법은,상기 가이디드 커브를 상기 이미지에 적용하여 상기 이미지의 각 픽셀에 대한 밝기가 조정된 조정 이미지를 출력하는 단계를 더 포함하는,저조명도 영상 개선을 위한 가이디드 커브 추정 장치. |
| 19 | 제18항에 있어서,상기 장치는 가이디드 커브 추정 모델을 포함하고,상기 가이디드 커브 추정 모델은,상기 이미지 및 상기 조정 이미지의 각 픽셀의 밝기를 기초로 산출된 손실함수를 기초로 기 학습된 것인,저조명도 영상 개선을 위한 가이디드 커브 추정 장치. |
| 20 | 제19항에 있어서,상기 손실함수는 채널 일관성 손실함수를 포함하고,상기 채널 일관성 손실함수는, 로 결정되고, 이 때, 는 상기 채널 일관성 손실함수, KL은 두 분포 사이의 차이를 수치적으로 나타낸 값, 는 상기 조정 이미지, 는 상기 이미지를 나타내는,저조명도 영상 개선을 위한 가이디드 커브 추정 장치. |
| 21 | 제19항에 있어서,상기 손실함수는 엣지 일관성 손실함수를 포함하고,상기 엣지 일관성 손실함수는,로 결정되고, 는 상기 엣지 일관성 손실함수, Y는 상기 조정 이미지, 는 임의의 상수인,저조명도 영상 개선을 위한 가이디드 커브 추정 장치. |
| 22 | 제19항에 있어서,상기 손실함수는 밝기 일관성 손실함수를 포함하고,상기 밝기 일관성 손실함수는,로 결정되고, 는 상기 밝기 일관성 손실함수, 는 HSV(hue, saturation, value) 색공간 형식으로 된 영상 I의 명도(V, value) 채널, 는 밝기 맵()의 곡률을 조정하는 변수인,저조명도 영상 개선을 위한 가이디드 커브 추정 장치. |
| 23 | 컴퓨터 실행 가능한 명령어를 저장하고 있는 컴퓨터 판독 가능 기록매체로서, 상기 컴퓨터 실행 가능한 명령어는, 프로세서에 의해 실행되면,인코더를 이용하여 입력된 이미지로부터 이미지 특징(feature)을 추출하는 단계; 및상기 이미지 특징을 디코더에 입력하여 상기 이미지 내 각 픽셀의 밝기를 표현하는 조정 맵 및 상기 밝기를 기초로 상기 이미지 내 각 픽셀에 대한 가중치를 부여하는 가이드 맵을 포함하는 가이디드 커브(guided curve)를 산출하는 단계를 포함하는 방법을 상기 프로세서가 수행하도록 하는,컴퓨터 판독 가능한 기록매체. |
| 24 | 컴퓨터 판독 가능한 기록매체에 저장되어 있는 컴퓨터 프로그램으로서,상기 컴퓨터 프로그램은, 프로세서에 의해 실행되면,인코더를 이용하여 입력된 이미지로부터 이미지 특징(feature)을 추출하는 단계; 및상기 이미지 특징을 디코더에 입력하여 상기 이미지 내 각 픽셀의 밝기를 표현하는 조정 맵 및 상기 밝기를 기초로 상기 이미지 내 각 픽셀에 대한 가중치를 부여하는 가이드 맵을 포함하는 가이디드 커브(guided curve)를 산출하는 단계를 포함하는 방법을 상기 프로세서가 수행하도록 하기 위한 명령어를 포함하는,컴퓨터 판독 가능한 기록매체에 저장되어 있는 컴퓨터 프로그램. |