| 번호 | 청구항 |
|---|---|
| 11 | 제10항에 있어서, 상기 센싱부는 사용자를 촬영하는 카메라, 및 사용자의 움직임을 감지하는 레이더 중 적어도 하나를 포함하는 재활운동로봇의 자세 제어 방법. |
| 9 | 제8항에 있어서, 상기 모델은 SVM(Support Vector Machine), K-NN(K-Nearest Neighbors), Random Forest, Decision Tree 중 적어도 하나를 포함하는 재활운동로봇의 자세 제어 장치. |
| 12 | 제10항에 있어서, 상기 센싱부는 사용자의 신체에 접촉되지 않는 비접촉식으로 사용자의 자세를 감지하는 재활운동로봇의 자세 제어 방법. |
| 10 | 센싱부가 사용자의 자세를 감지하는 단계; 프로세서가 상기 센싱부에 의해 감지된 감지 정보를 토대로 사용자의 관절 위치를 수집하고 상기 관절 위치를 토대로 사용자의 자세가 보상운동인지를 판별하여 판별 결과에 따라 사용자의 자세를 교정하기 위한 피드백 정보를 생성하는 단계; 및 출력부가 상기 피드백 정보를 출력하는 단계를 포함하는 재활운동로봇의 자세 제어 방법. |
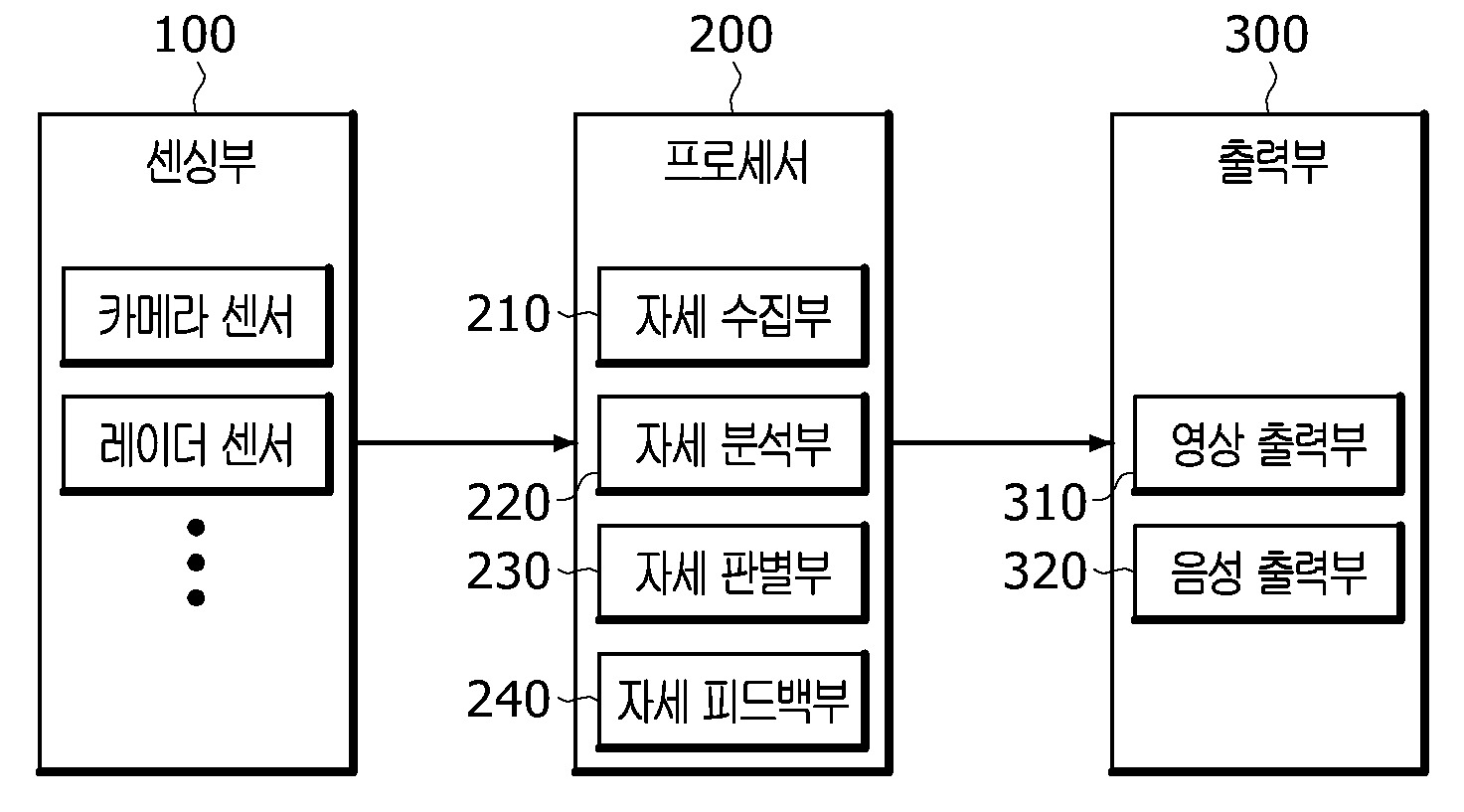
| 1 | 사용자의 자세를 감지하는 센싱부; 사용자의 자세를 교정하기 위한 피드백 정보를 출력하는 출력부; 및상기 센싱부에 의해 감지된 감지 정보를 토대로 사용자의 관절 위치를 수집하고 상기 관절 위치를 토대로 사용자의 자세가 보상운동인지를 판별하고, 판별 결과에 따라 상기 피드백 정보를 생성하여 상기 출력부를 통해 출력하는 프로세서를 포함하는 재활운동로봇의 자세 제어 장치. |
| 2 | 제1항에 있어서, 상기 센싱부는 사용자를 촬영하는 카메라, 및 사용자의 움직임을 감지하는 레이더 중 적어도 하나를 포함하는 재활운동로봇의 자세 제어 장치. |
| 3 | 제1항에 있어서, 상기 센싱부는 사용자의 신체에 접촉되지 않는 비접촉식으로 사용자의 자세를 감지하는 재활운동로봇의 자세 제어 장치. |
| 4 | 제1항에 있어서, 상기 피드백 정보는 사용자가 자세를 교정하도록 안내하는 시각 자료와 청각 자료 중 적어도 하나를 포함하는 재활운동로봇의 자세 제어 장치. |
| 5 | 제1항에 있어서, 상기 관절 위치는 머리(Head), 목(Neck), 상체(Torso), 허리(Waist), 왼쪽 어깨(Left shoulder), 왼쪽 팔꿈치(Left elbow), 왼쪽 팔목(Left wrist), 왼쪽 손(Left hand), 오른쪽 어깨(Right shoulder), 오른쪽 팔꿈치(Right elbow), 오른쪽 팔목(Right wrist), 오른쪽 손(Right hand) 중 적어도 하나를 포함하는 재활운동로봇의 자세 제어 장치. |
| 6 | 제1항에 있어서, 상기 프로세서는 상기 관절 위치를 이용하여 운동의 시작 지점과 끝 지점으로 정의되는 구간에서의 관절가동범위를 계산하고, 상기 관절가동범위 이내에서의 운동 정보를 연산하는 재활운동로봇의 자세 제어 장치. |
| 7 | 제6항에 있어서, 상기 운동 정보는 왼쪽 어깨와 오른쪽 어깨 중심점의 앞 이동거리, 몸통 회전 각도 중심점의 옆 이동거리, 왼쪽 어깨 또는 오른쪽 어깨 좌표의 위 이동거리, 몸통 앞 기울임 각도, 몸통 옆 기울임 각도, 몸통 회전 각도, 어깨 외전 각도, 어깨 구부림 각도, 어깨 수평 외전 각도, 팔 평면과 몸통 각도, 및 팔꿈치 각도 중 적어도 하나를 포함하는 재활운동로봇의 자세 제어 장치. |
| 8 | 제1항에 있어서, 상기 프로세서는 상기 관절 위치를 이용하여 운동의 시작 지점과 끝 지점으로 정의되는 구간에서의 관절가동범위를 입력으로 하는 모델을 이용하여 사용자의 자세가 상기 보상운동인지를 판별하는 재활운동로봇의 자세 제어 장치. |
| 13 | 제10항에 있어서, 상기 피드백 정보는 사용자가 자세를 교정하도록 안내하는 시각 자료와 청각 자료 중 적어도 하나를 포함하는 재활운동로봇의 자세 제어 방법. |
| 14 | 제10항에 있어서, 상기 관절 위치는 머리, 목, 상체, 허리, 왼쪽 어깨, 왼쪽 팔꿈치, 왼쪽 팔목, 왼쪽 손, 오른쪽 어깨, 오른쪽 팔꿈치, 오른쪽 팔목, 오른쪽 손 중 적어도 하나를 포함하는 재활운동로봇의 자세 제어 방법. |
| 15 | 제10항에 있어서, 상기 피드백 정보를 생성하는 단계에서, 상기 프로세서는 상기 관절 위치를 이용하여 운동의 시작 지점과 끝 지점으로 정의되는 구간에서의 관절가동범위를 계산하고, 상기 관절가동범위 이내에서의 운동 정보를 연산하는 재활운동로봇의 자세 제어 방법. |
| 16 | 제15항에 있어서, 상기 운동 정보는 왼쪽 어깨와 오른쪽 어깨 중심점의 앞 이동거리, 몸통 회전 각도 중심점의 옆 이동거리, 왼쪽 어깨 또는 오른쪽 어깨 좌표의 위 이동거리, 몸통 앞 기울임 각도, 몸통 옆 기울임 각도, 몸통 회전 각도, 어깨 외전 각도, 어깨 구부림 각도, 어깨 수평 외전 각도, 팔 평면과 몸통 각도, 및 팔꿈치 각도 중 적어도 하나를 포함하는 재활운동로봇의 자세 제어 방법. |
| 17 | 제10항에 있어서, 상기 피드백 정보를 생성하는 단계에서, 상기 프로세서는 상기 관절 위치를 이용하여 운동의 시작 지점과 끝 지점으로 정의되는 구간에서의 관절가동범위를 입력으로 하는 모델을 이용하여 사용자의 자세가 상기 보상운동인지를 판별하는 재활운동로봇의 자세 제어 방법. |
| 18 | 제17항에 있어서, 상기 모델은 SVM(Support Vector Machine), K-NN(K-Nearest Neighbors), Random Forest, Decision Tree 중 적어도 하나를 포함하는 재활운동로봇의 자세 제어 방법. |