| 번호 | 청구항 |
|---|---|
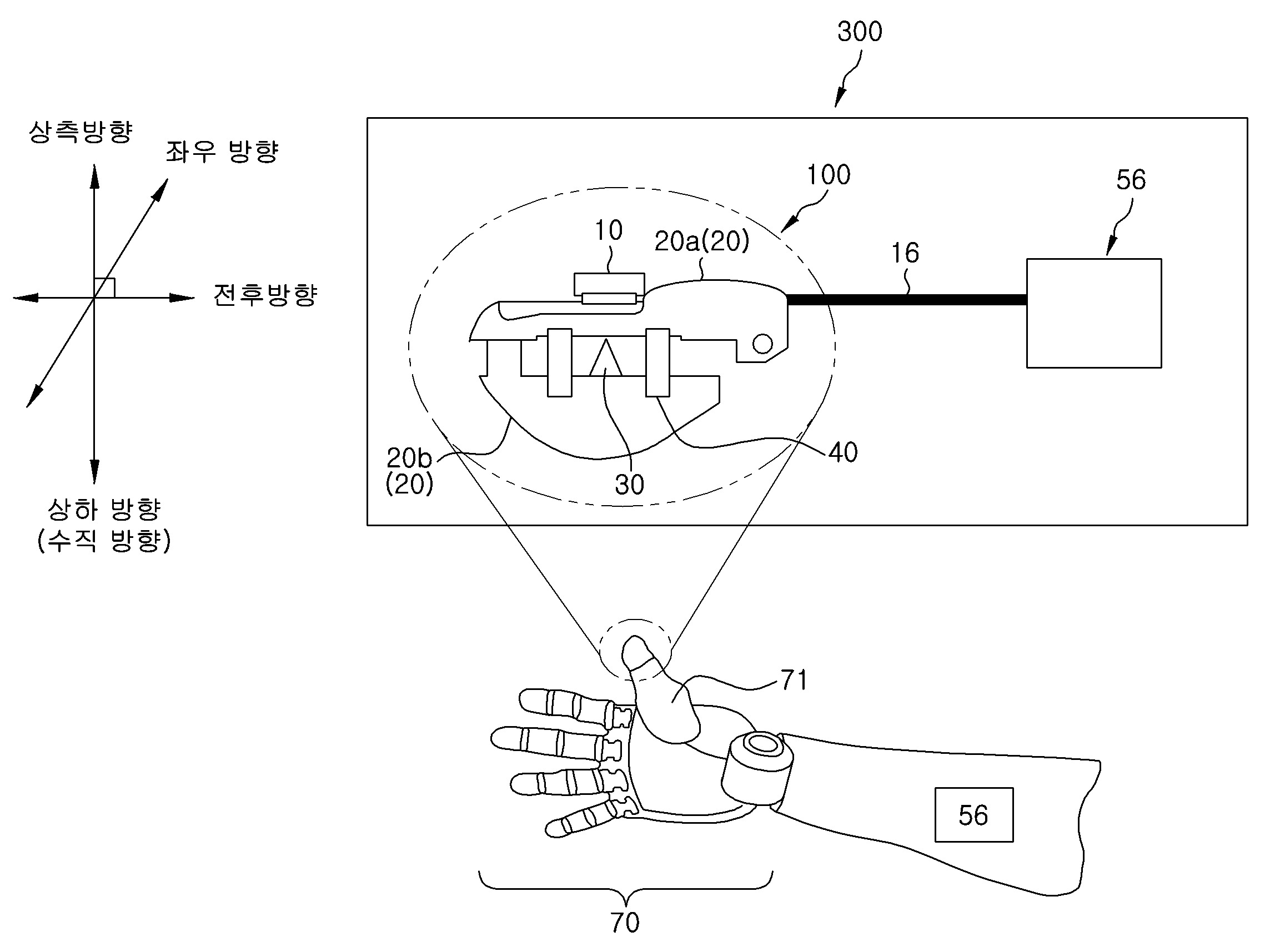
| 1 | 로봇의 손가락에 작용하는 압력을 감지하는 압력 센싱 수단; 및상기 압력 센싱 수단에서 감지된 압력의 크기와 방향을 산출하는 압력 계산부; 를 포함하며,상기 압력 센싱 수단은,상기 로봇의 손가락의 적어도 일부를 형성하며, 핑거팁 상측 하우징 및 상기 핑거팁 상측 하우징에 대하여 상대적인 움직임이 가능하도록 상기 핑거팁 상측 하우징에 결합되는 핑거팁 하측 하우징을 포함하는 핑거팁 하우징; 상기 핑거팁 하측 하우징과 함께 움직이도록 상기 핑거팁 하측 하우징에 배치되는 원뿔 기둥; 상기 원뿔 기둥의 중심 좌표를 제공하도록 상기 원뿔 기둥의 꼭지점에 형성되는 꼭지점 표식;상기 핑거팁 상측 하우징의 손톱 부위에 있는 개구부를 통해 배치되어 상기 원뿔 기둥의 상측에서 촬영된 이미지인 원뿔 이미지를 제공하는 이미지 센서; 및 상기 핑거팁 하측 하우징과 상기 핑거팁 상측 하우징에 연결되며 상기 핑거팁 하우징에 작용하는 압력에 의한 상기 핑거팁 하측 하우징의 움직임에 따라 변형되도록 탄성재질로 형성되는 하나 이상의 탄성 복원 기둥을 포함하고,상기 압력 센싱 수단은,상기 핑거팁 하우징에 압력이 변화될 때에, 상기 이미지 센서에 의해 촬영되는 상기 원뿔 기둥에서의 영역이 변경되도록 구성되고,상기 압력 센싱 수단은, 코어봉을 더 포함하고,상기 꼭지점 표식은 상기 코어봉이 상기 원뿔 기둥의 중심을 관통하는 삽입홀을 통해 상기 원뿔 기둥과 결합되면서 상기 코어봉의 상단부가 상기 원뿔 기둥의 외부로 노출 되는 것에 의해 형성되는, 로봇 손가락 압력 센서 장치. |
| 2 | 제 1 항에 있어서, 상기 압력 계산부는, 상기 핑거팁 하우징에 압력이 작용하지 않을 때의 상기 원뿔 이미지의 직경, 및 상기 핑거팁 하우징에 압력이 작용할 때의 상기 원뿔 이미지의 직경에 기초하여 상하 방향으로 상기 핑거팁 하우징에 작용하는 압력의 크기를 산출하는, 로봇 손가락 압력 센서 장치. |
| 3 | 제 1 항에 있어서, 상기 압력 계산부는, 상기 이미지 센서의 중심 좌표 또는 상기 핑거팁 하우징에 압력이 작용하지 않을 때의 상기 원뿔 이미지의 중심 좌표를 원점 좌표로 설정하는 원점 좌표 표시 수단을 포함하고, 상기 핑거팁 하우징에 압력이 작용하였을 때 상기 꼭지점 표식이 상기 원점 좌표로부터 벗어난 정도에 기초하여 전후 및 좌우 방향으로 상기 핑거팁 하우징에 작용하는 압력의 크기 및 압력의 방향 중 하나 이상을 산출하는, 로봇 손가락 압력 센서 장치. |
| 4 | 제 1 항에 있어서, 상기 탄성재질은, 엘라스토머(elastomer), 실리콘 고무, PDMS(polydimethylsiloxane), 폴리머 고무, 쿠션(cushion)재료, 및 코일 스프링 중 선택된 어느 하나 내지 이들의 조합인, 로봇 손가락 압력 센서 장치. |
| 5 | 제 1 항에 있어서, 상기 탄성 복원 기둥은, 서로 다른 탄성계수 또는 스프링 계수를 가지는 복수 개의 탄성체가 상하 방향으로 배열되도록 구성되는, 로봇 손가락 압력 센서 장치. |
| 6 | 삭제 |