| 번호 | 청구항 |
|---|---|
| 1 | 모터 회전에 의해 로봇 손가락의 벤딩(bending)을 제어하는 로봇 손가락 구동부;상기 로봇 손가락의 벤딩량을 검출하기 위한 벤딩 센싱 수단; 및 상기 로봇 손가락의 벤딩량을 산출하기 위한 벤딩 계산부;를 포함하고,상기 벤딩 센싱 수단은,상기 로봇 손가락의 벤딩에 따라 전진 내지 후진 이동하는 전자펜; 및상기 전자펜의 전진 내지 후진 이동에 따라 선(line)이 그려지는 터치 패드;를 포함하는 것인,손가락 벤딩 센서 장치. |
| 2 | 제 1 항에 있어서,상기 로봇 손가락 구동부는,모터의 회전축에 연결된 리드 스크류;상기 리드 스크류의 회전 방향에 따라 상기 리드 스크류 축 방향으로 전진 또는 후진 이동하는 와이어 너트; 및상기 와이어 너트의 전진 또는 후진 이동에 따라 상기 로봇 손가락의 벤딩량이 조절되도록 하는 힘줄 와이어;를 포함하는 것인, 손가락 벤딩 센서 장치. |
| 3 | 제 2 항에 있어서, 상기 와이어 너트에 상기 전자펜이 물리적으로 결합되어, 상기 와이어 너트의 전진 또는 후진 이동에 따라 상기 전자펜이 같이 연동하여 전진 또는 후진 이동하는 것인, 손가락 벤딩 센서 장치. |
| 4 | 제 1 항에 있어서, 상기 전자펜은,상기 터치 패드와 접촉 시, 수직 압력 방향에 대해 상기 전자펜에게 탄성적 수축을 제공하는 스프링 핀; 및 상기 터치 패드 상에 전기적 특성 변화를 유도하는 전하 컬렉터;를 포함하는 것인, 손가락 벤딩 센서 장치. |
| 5 | 제 1 항에 있어서, 상기 전자펜은,상기 터치 패드와 접촉 시, 수직 압력 방향에 대해 상기 전자펜에게 탄성적 수축을 제공하고, 동시에 상기 터치 패드 상에 전기적 특성 변화를 유도하는 도체 스프링 코일을 포함하는 것인, 손가락 벤딩 센서 장치 |
| 6 | 제 1 항에 있어서, 상기 전자펜은 전원선의 접지단자 또는 마이너스 단자에 전기적으로 연결되는 것인, 손가락 벤딩 센서 장치. |
| 7 | 제 1 항에 있어서, 상기 벤딩 계산부는 상기 터치 패드 상에서 상기 전자펜의 원점으로부터 상기 전자펜의 현재 위치까지의 직선 거리를 측량하여 로봇 손가락의 벤딩량을 산출하는 것인, 손가락 벤딩 센서 장치. |
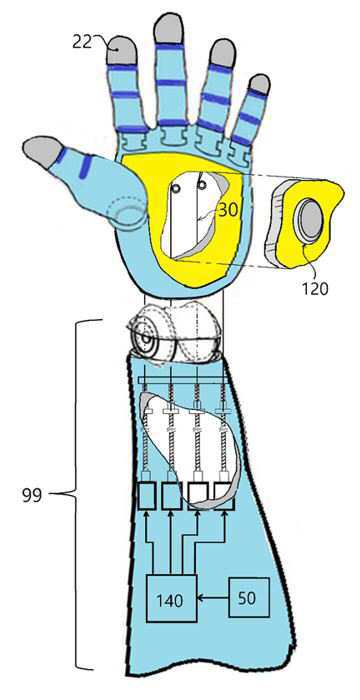
| 8 | 제 1 항에 있어서, 상기 손가락 벤딩 센서 장치는 로봇 손바닥면에 파지할 물체를 인식하기 위한 이미지센서를 추가 포함하는 것인,손가락 벤딩 센서 장치. |
| 9 | 제 8 항에 있어서,상기 로봇 손가락 구동부는 상기 이미지센서로부터의 영상을 기반으로 파지할 물체 모양을 인식하고, 상기 벤딩 계산부로부터 산출된 손가락 벤딩량을 기반으로, 최적의 로봇 핸드 파지 제스처(robot hand grasping gesture)를 생성하기 위한 제어 신호를 상기 모터에 공급하는 로봇 손 제스처 산출부를 포함하는 것인, 손가락 벤딩 센서 장치. |
| 10 | 제 1 항에 있어서, 상기 로봇 손가락은 로봇 손가락 벤딩 후 로봇 손가락을 원래 상태로 펴기 위한 복귀 와이어, 스프링, 고무줄 및 이들의 조합들로 이루어진 군에서 선택되는 복원수단을 포함하는 것인, 손가락 벤딩 센서 장치. |
| 11 | 제 1 항 내지 제 10 항 중 어느 한 항에 따른 손가락 벤딩 센서 장치에 의해 수행되는 로봇 핸드 파지 제스처 제어 방법에 있어서,상기 로봇 핸드 파지 제스처 제어 방법은,로봇 손 제스처 산출부에 의해 이미지센서로부터의 영상을 기반으로 파지할 물체 모양을 인식하는 단계;벤딩 계산부에 의해 터치 패드 상에 그려진 전자펜의 원점으로부터 현재 전자펜의 위치까지의 직선 거리를 측량하여 로봇 손가락의 벤딩량을 산출하는 단계; 및상기 로봇 손 제스처 산출부에 인식된 파지할 물체 모양과 상기 벤딩 계산부로부터 파악된 로봇 손가락 벤딩량을 기반으로, 최적의 로봇 핸드 파지 제스처를 결정하여 로봇 손가락의 벤딩을 제어하는 단계;를 포함하는 것인,로봇 핸드 파지 제스처 제어 방법. |
| 12 | 제 1 항 내지 제 10 항 중 어느 한 항에 따른 손가락 벤딩 센서 장치를 포함하는, 인공 지능 로봇. |