| 번호 | 청구항 |
|---|---|
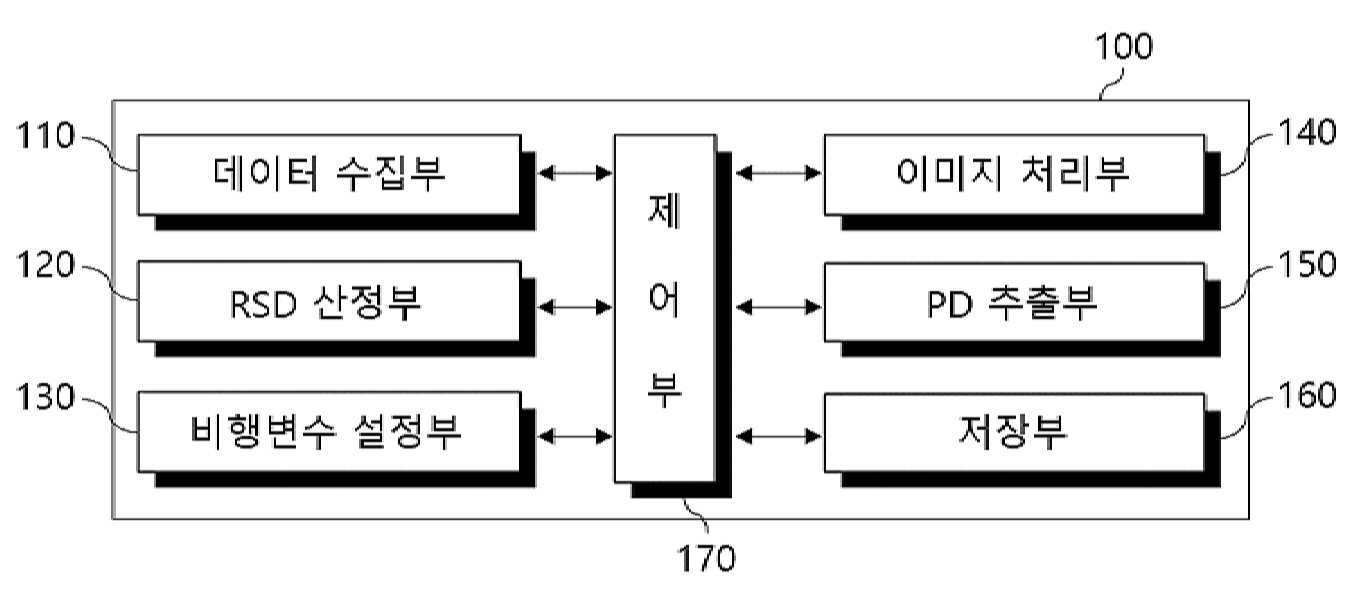
| 1 | 무인항공기에 의해 촬영되는 현장에 대한 이미지 데이터를 수집하는 데이터 수집부;상기 수집된 이미지 데이터를 이용하여 요구 표본거리(Required Sample Distance)를 산정하는 RSD 산정부;상기 산정된 요구 표본거리를 이용하여 상기 무인항공기에 대한 비행변수를 설정하는 비행변수 설정부; 및상기 설정된 비행변수를 반영하여 상기 이미지 데이터로부터 3차원 포인트 클라우드를 추출하는 PD 추출부;를 포함하는 것을 특징으로 하는 건설현장의 3차원 포인트 클라우드 추출 장치. |
| 2 | 제 1 항에 있어서,상기 RSD 산정부는,상기 이미지 데이터를 이용하여 지형 복잡성 계수 및 비행 안정성 계수를 결정하고, 상기 결정된 지형 복잡성 계수(terrain complexity coefficient) 및 비행 안정성 계수(flight stability coefficient)를 반영하여 상기 요구 표본거리를 산정하는 것을 특징으로 하는 건설현장의 3차원 포인트 클라우드 추출 장치. |
| 3 | 제 2 항에 있어서,상기 RSD 산정부는, 지형을 간단한 지형, 보통 지형 및 복잡한 지형으로 구분한 후, 각 지형별로 서로 상이한 계수를 적용하는 것을 특징으로 하는 건설현장의 3차원 포인트 클라우드 추출 장치. |
| 4 | 제 2 항에 있어서,상기 RSD 산정부는, 상기 무인항공기의 비행 환경을 매우 안정적인 비행, 보통 안정적인 비행 및 불안정한 비행으로 구분한 후, 각 비행 환경별로 서로 상이한 계수를 적용하는 것을 특징으로 하는 건설현장의 3차원 포인트 클라우드 추출 장치. |
| 5 | 제 2 항에 있어서,상기 RSD 산정부는, 하기 수식에 의해 상기 요구 표본거리를 산출하는 것을 특징으로 하는 건설현장의 3차원 포인트 클라우드 추출 장치:여기서 RSD는 상기 요구 표본거리, h는 상기 무인항공기의 비행 고도, f는 초점거리, Wsensor는 카메라의 물리적 너비, Wimage는 이미지 해상도 너비, Tterrain은 상기 지형 복잡성 계수 및 Sstability는 상기 비행 안정성 계수이다. |
| 6 | 제 1 항에 있어서,상기 비행변수 설정부는, 하기 수식을 이용하여 상기 무인항공기가 비행해야 하는 최소 속도를 산출하는 것을 특징으로 하는 건설현장의 3차원 포인트 클라우드 추출 장치:여기서, V는 상기 최소 속도, RSD는 상기 요구 표본거리, Himage는 이미지 높이, △t는 촬영 간격, O는 목표 중복도이다. |
| 7 | 무인항공기를 이용하여 건설현장에 대한 이미지 데이터를 수집하는 단계;상기 수집된 이미지 데이터를 이용하여 요구 표본거리(Required Sample Distance)를 산정하는 단계;상기 산정된 요구 표본거리를 이용하여 상기 무인항공기에 대한 비행변수를 설정하는 단계; 및상기 설정된 비행변수를 반영하여 상기 이미지 데이터로부터 3차원 포인트 클라우드를 추출하는 단계;를 포함하는 것을 특징으로 하는 건설현장의 3차원 포인트 클라우드 추출 방법. |