| 번호 | 청구항 |
|---|---|
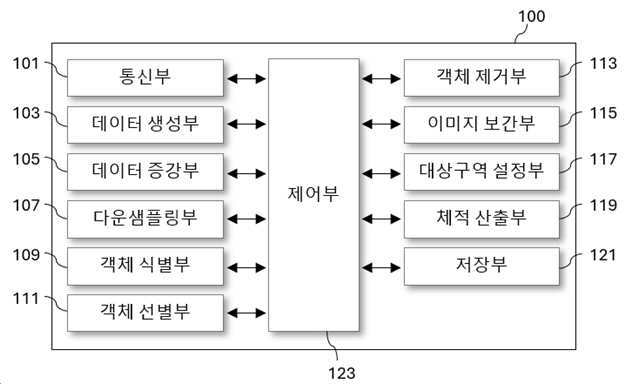
| 1 | 건설현장 이미지로부터 포인트 클라우드 데이터를 생성하는 데이터 생성부;상기 포인트 클라우드 데이터에 대한 데이터 증강을 수행하는 데이터 증강부;상기 포인트 클라우드 데이터에 대한 다운샘플링을 수행하는 다운샘플링부;상기 다운샘플링된 포인트 클라우드 데이터를 이용하여 객체를 식별하는 객체 식별부;상기 식별된 객체 중 불필요한 객체를 선별하는 객체 선별부;상기 건설현장 이미지로부터 상기 선별된 불필요한 객체를 제거하는 객체 제거부; 및상기 건설현장 이미지에서 상기 불필요한 객체가 제거된 영역을 보간하는 이미지 보간부;를 포함하고,상기 다운샘플링부는,상기 객체 식별부에서 식별해야 할 객체 중 가장 작은 객체를 기준으로 설정한 분류 목표 크기에 해당하는 포인트 영역을 설정하고, 상기 설정된 포인트 영역을 복수개의 섹터로 구분하여 각 섹터 내 포인트에 대한 노멀 벡터를 계산하며, 각 섹터 내에서 평균 노멀 벡터와 가장 유사한 포인트를 남기는 동작을 수행하며,상기 포인트 영역 내에 존재하는 포인트들의 방위각 및 고도각을 산정하고, 상기 산정된 포인트들의 방위각 및 고도각을 반영하여 상기 포인트 영역을 상기 복수개의 섹터로 구분하며,하기의 수식에 의해 상기 포인트들의 방위각을 산정하는 것을 특징으로 하는 건설현장의 지표 분류 장치:여기서, 는 i번째 포인트의 방위각, xi 및 yi는 i번째 포인트의 좌표, xc 및 yc는 상기 포인트 영역의 중심 좌표이다. |
| 2 | 삭제 |
| 3 | 삭제 |
| 4 | 삭제 |
| 5 | 제 1 항에 있어서,상기 다운샘플링부는, 하기의 수식에 의해 상기 포인트들의 고도각을 산정하는 것을 특징으로 하는 건설현장의 지표 분류 장치:여기서, 는 i번째 포인트의 고도각, xi ,yi 및 zi는 i번째 포인트의 좌표, xc, yc 및 zc는 상기 포인트 영역의 중심 좌표이다. |
| 6 | 제 1 항에 있어서,상기 다운샘플링부는, 하기의 수식에 의해 상기 평균 노멀 벡터와 유사한 포인트를 탐색하는 것을 특징으로 하는 건설현장의 지표 분류 장치:여기서, θ는 두 벡터간의 각도, ni는 i번째 포인트 간의 각도, na는 상기 평균 노멀 벡터이다. |
| 7 | 제 1 항에 있어서,상기 객체 식별부는, 특정 클래스에 대하여 주변 포인트들의 클래스에 토양이 기설정된 임계비율 이상 존재하는 경우에는 상기 클래스를 토양으로 부여하는 것을 특징으로 하는 건설현장의 지표 분류 장치. |
| 8 | 카메라를 이용하여 건설현장 이미지를 촬영하고, 상기 건설현장 이미지를 전송받는 장치에 적용되는 방법에 있어서,상기 건설현장 이미지로부터 포인트 클라우드 데이터를 생성하는 단계;상기 포인트 클라우드 데이터에 대한 데이터 증강을 수행하는 단계;상기 포인트 클라우드 데이터에 대한 다운샘플링을 수행하는 단계;상기 다운샘플링된 포인트 클라우드 데이터를 이용하여 객체를 식별하는 단계;상기 식별된 객체 중 불필요한 객체를 선별하는 단계;상기 건설현장 이미지로부터 상기 선별된 불필요한 객체를 제거하는 단계; 및상기 건설현장 이미지에서 상기 불필요한 객체가 제거된 영역을 보간하는 단계;를 포함하고,상기 다운샘플링을 수행하는 단계는,식별해야 할 객체 중 가장 작은 객체를 기준으로 설정한 분류 목표 크기에 해당하는 포인트 영역을 설정하는 단계;상기 설정된 포인트 영역을 복수개의 섹터로 구분하여 각 섹터 내 포인트에 대한 노멀 벡터를 계산하는 단계;각 섹터 내에서 평균 노멀 벡터와 가장 유사한 포인트를 남기는 동작을 수행하는 단계;상기 포인트 영역 내에 존재하는 포인트들의 방위각 및 고도각을 산정하는 단계;상기 산정된 포인트들의 방위각 및 고도각을 반영하여 상기 포인트 영역을 상기 복수개의 섹터로 구분하는 단계;하기의 수식에 의해 상기 포인트들의 방위각을 산정하는 단계;를 포함하는 것을 특징으로 하는 건설현장의 지표 분류 방법:여기서, 는 i번째 포인트의 방위각, xi 및 yi는 i번째 포인트의 좌표, xc 및 yc는 상기 포인트 영역의 중심 좌표이다. |