| 번호 | 청구항 |
|---|---|
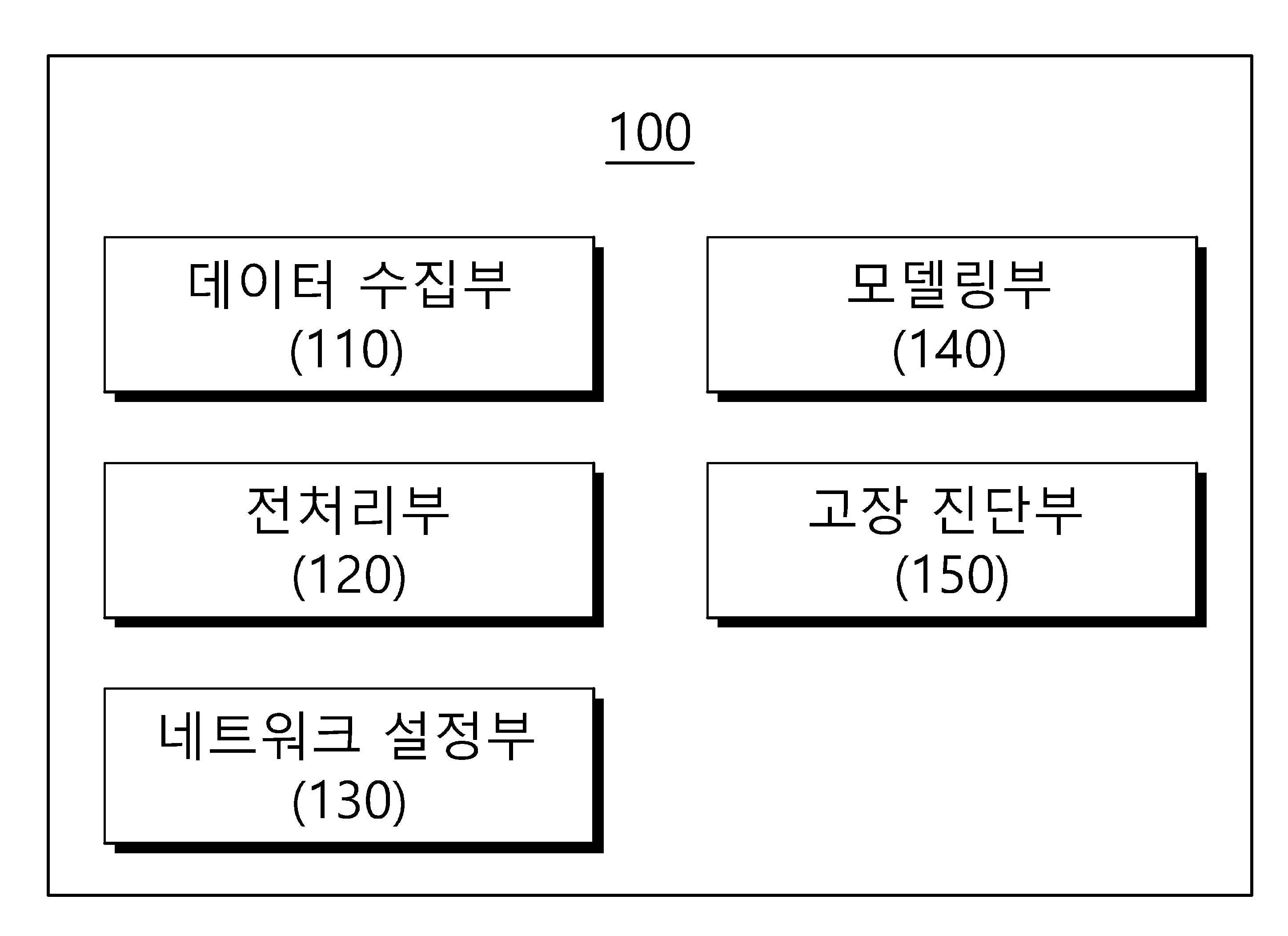
| 1 | 항공기용 구동 장치의 상태를 센싱하는 복수의 센서로부터 복수의 센서 데이터를 수집하는 데이터 수집부;상기 복수의 센서 데이터의 파라미터를 기초로 초기 센서 네트워크를 설정하고, 새로운 복수의 센서 데이터가 수집되는 경우 베이지안(Bayesian) 추론 방식에 따라 상기 초기 센서 네트워크를 업데이트하는 네트워크 설정부;미리 마련된 학습용 데이터와 상기 초기 센서 네트워크를 이용하여 딥러닝 진단 모델의 학습을 수행하고, 상기 초기 센서 네트워크의 업데이트에 따라 상기 딥러닝 진단 모델의 학습을 반복 수행하는 모델링부; 및업데이트 완료된 센서 네트워크와 상기 딥러닝 진단 모델을 이용하여 상기 항공기용 구동 장치의 고장 상태를 진단하는 고장 진단부;를 포함하는 베이지안 기반 딥러닝 진단 모델을 이용한 고장 진단 장치. |
| 2 | 제 1 항에 있어서,상기 복수의 센서 종류 별로 상기 복수의 센서 데이터에 대해 전처리를 수행하고, 전처리된 복수의 센서 데이터를 상기 네트워크 설정부로 전달하는 전처리부;를 더 포함하는 것을 특징으로 하는 베이지안 기반 딥러닝 진단 모델을 이용한 고장 진단 장치. |
| 3 | 제 1 항에 있어서,상기 복수의 센서 데이터는,상기 항공기용 구동 장치의 3축 진동 신호, 및 3상 전류 신호를 포함하는 것을 특징으로 하는 베이지안 기반 딥러닝 진단 모델을 이용한 고장 진단 장치. |
| 4 | 제 1 항에 있어서,상기 네트워크 설정부는,사전 확률 분포를 이용하여 상기 복수의 센서 데이터의 파라미터를 추출하고, 추출된 파라미터를 이용하여 상기 초기 센서 네트워크를 설정하는 것을 특징으로 하는 베이지안 기반 딥러닝 진단 모델을 이용한 고장 진단 장치. |
| 5 | 제 4 항에 있어서,상기 네트워크 설정부는,상기 새로운 센서 데이터가 수집되는 경우, 상기 새로운 센서 데이터에 대한 상기 딥러닝 진단 모델의 출력값을 최대 우도값으로 설정하고, 상기 최대 우도값과 사전 확률 분포값을 곱하여 사후 확률 분포를 획득하며, 상기 사후 확률 분포를 이용하여 상기 초기 센서 네트워크의 파라미터를 업데이트하는 것을 특징으로 하는 베이지안 기반 딥러닝 진단 모델을 이용한 고장 진단 장치. |
| 6 | 데이터 수집부가, 항공기용 구동 장치의 상태를 센싱하는 복수의 센서로부터 복수의 센서 데이터를 수집하는 데이터 수집 단계;네트워크 설정부가, 상기 복수의 센서 데이터의 파라미터를 기초로 초기 센서 네트워크를 설정하는 네트워크 설정 단계;모델링부가, 미리 마련된 학습용 데이터와 상기 초기 센서 네트워크를 이용하여 딥러닝 진단 모델의 학습을 수행하는 모델 학습 단계;상기 네트워크 설정부가, 새로운 센서 데이터가 수집되는 경우 베이지안(Bayesian) 추론 방식에 따라 상기 초기 센서 네트워크를 업데이트하는 네트워크 업데이트 단계;상기 모델링부가, 상기 초기 센서 네트워크의 업데이트에 따라 상기 딥러닝 진단 모델의 학습을 반복 수행하는 반복 학습 단계; 및고장 진단 부가, 업데이트 완료된 센서 네트워크와 상기 딥러닝 진단 모델을 이용하여 상기 항공기용 구동 장치의 고장 상태를 진단하는 고장 진단 단계;를 포함하는 베이지안 기반 딥러닝 진단 모델을 이용한 고장 진단 방법. |
| 7 | 제 6 항에 있어서,상기 데이터 수집 단계 이후에, 전처리부가, 상기 복수의 센서 종류 별로 상기 복수의 센서 데이터에 대해 전처리를 수행하고, 전처리된 복수의 센서 데이터를 상기 네트워크 설정부로 전달하는 전처리 단계;를 더 포함하는 것을 특징으로 하는 베이지안 기반 딥러닝 진단 모델을 이용한 고장 진단 방법. |
| 8 | 제 6 항에 있어서,상기 복수의 센서 데이터는,상기 항공기용 구동 장치의 3축 진동 신호, 및 3상 전류 신호를 포함하는 것을 특징으로 하는 베이지안 기반 딥러닝 진단 모델을 이용한 고장 진단 방법. |
| 9 | 제 6 항에 있어서,상기 네트워크 설정 단계는, 상기 네트워크 설정부가,사전 확률 분포를 이용하여 상기 복수의 센서 데이터의 파라미터를 추출하고, 추출된 파라미터를 이용하여 상기 초기 센서 네트워크를 설정하는 단계를 포함하는 것을 특징으로 하는 베이지안 기반 딥러닝 진단 모델을 이용한 고장 진단 방법. |
| 10 | 제 6 항에 있어서,상기 모델 학습 단계 이후에, 상기 모델링부가, 미리 마련된 검증 데이터셋을 이용하여 상기 딥러닝 진단 모델의 진단 성능을 평가하는 모델 평가 단계; 및상기 네트워크 설정부가, 상기 딥러닝 진단 모델의 진단 성능 평가 이후에 새로운 복수의 센서 데이터를 입력받는 데이터 입력 단계;를 더 포함하는 것을 특징으로 하는 베이지안 기반 딥러닝 진단 모델을 이용한 고장 진단 방법. |
| 11 | 제 10 항에 있어서,상기 네트워크 업데이트 단계는, 상기 네트워크 설정부가,상기 데이터 입력 단계에서 새로운 복수의 센서 데이터가 수집되는 경우, 상기 새로운 복수의 센서 데이터에 대한 상기 딥러닝 진단 모델의 출력값을 최대 우도값으로 설정하고, 상기 최대 우도값과 사전 확률 분포값을 곱하여 사후 확률 분포를 획득하며, 상기 사후 확률 분포를 이용하여 상기 초기 센서 네트워크의 파라미터를 업데이트하는 단계를 포함하는 것을 특징으로 하는 베이지안 기반 딥러닝 진단 모델을 이용한 고장 진단 방법. |
| 12 | 제 6 항에 있어서,상기 반복 학습 단계는, 상기 모델링부가, 상기 초기 센서 네트워크의 업데이트에 따라 상기 딥러닝 진단 모델의 손실항이 수렴될 때까지 상기 딥러닝 진단 모델의 학습을 반복 수행하는 단계를 포함하는 것을 특징으로 하는 베이지안 기반 딥러닝 진단 모델을 이용한 고장 진단 방법. |