| 번호 | 청구항 |
|---|---|
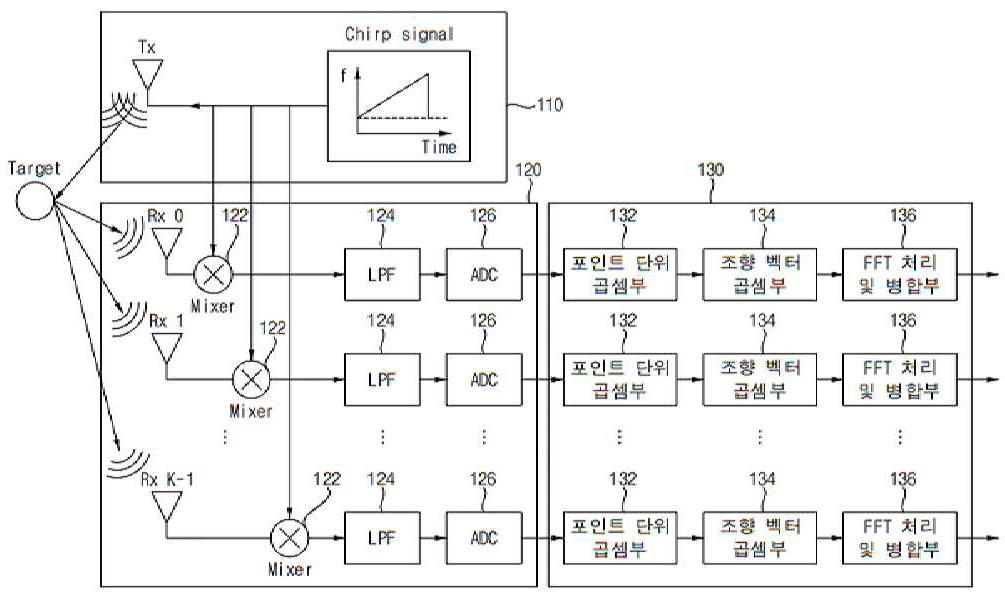
| 1 | 하나 이상의 송신 안테나를 포함하여, 각 송신 안테나는 FMCW 송신 신호를 생성하여 타겟으로 출력하는 송신 모듈; 하나 이상의 수신 안테나를 포함하여, 각 수신 안테나는 상기 변조된 FMCW 송신 신호가 상기 타겟에 반사된 FMCW 수신 신호를 수신하여 상기 FMCW 송신 신호와 믹싱 처리하고, 아날로그-디지털 변환하여 디지털 비트 신호로 생성하는 수신 모듈; 및 상기 디지털 비트 신호에 기초하여 추정하고자 하는 각도마다 정의되는 보상 행렬에 비트 신호와 포인트 단위 곱셈을 수행한 후 거리-각도 응답을 획득하는 신호 처리 모듈을 포함하는 MIMO FMCW 레이더 시스템. |
| 2 | 제1항에 있어서, 상기 수신 모듈은, FMCW 송신 신호와 FMCW 수신 신호를 믹싱 처리하는 하나 이상의 믹서; 상기 믹서에 의해 믹싱된 신호에 대해 특정한 차단 주파수 이하의 주파수 신호만 통과시키는 하나 이상의 로우패스 필터; 및 상기 로우패스 필터를 통과한 신호를 디지털 변환하여 디지털 비트 신호를 출력하는 하나 이상의 아날로그-디지털 변환기를 포함하는 것을 특징으로 하는 MIMO FMCW 레이더 시스템. |
| 3 | 제1항에 있어서, 상기 신호 처리 모듈은, 각 타겟 그리드에 대해 보상 행렬을 사용하여 포인트 단위 곱셈 연산을 수행하는 하나 이상의 포인트 단위 곱셈부; 보상 결과 행렬에 스티어링 벡터를 곱셈 연산하는 하나 이상의 스티어링 벡터 곱셈부; 및 한 처프 내의 ADC 샘플 인덱스에 대해 고속푸리에 변환 처리 연산을 수행하고 병합 처리하여 상기 거리-각도 응답을 획득하는 하나 이상의 FFT 처리-병합부를 포함하는 것을 특징으로 하는 MIMO FMCW 레이더 시스템. |
| 4 | 제3항에 있어서, 상기 보상 행렬은 추정하고자 하는 각도마다 정의되는 것을 특징으로 하는 MIMO FMCW 레이더 시스템. |
| 5 | 제3항에 있어서, 상기 보상 행렬 은, (여기서, 는 광속이고, 는 하나의 처프(chirp)내 ADC 샘플 수이고, 는 처프 신호의 대역폭이고, 는 안테나 간의 간격이고, 은 ADC 샘플 인덱스이고, 는 수신 안테나의 인덱스이고, 는 수신 안테나 수이다.)에 의해 정의되는 것을 특징으로 하는 MIMO FMCW 레이더 시스템. |
| 6 | 제3항에 있어서, 상기 보상 결과 행렬 은, (여기서, 는 아다마르 곱(Hadarmard product)을 의미한다.)에 의해 정의되는 것을 특징으로 하는 MIMO FMCW 레이더 시스템. |
| 7 | 제3항에 있어서, 상기 스티어링 벡터 는, (여기서, 는 수신 안테나 수이고, 이다.)에 의해 정의되는 것을 특징으로 하는 MIMO FMCW 레이더 시스템. |
| 8 | 제3항에 있어서, 상기 거리-각도 응답 은, 에 의해 정의되는 것을 특징으로 하는 MIMO FMCW 레이더 시스템. |
| 9 | 처프 지속 시간에 따라 주파수가 선형적으로 증가하는 FMCW 송신 신호를 송신 안테나를 통해 전송한 후 시간 지연된 FMCW 수신 신호를 수신 안테나를 통해 수신하여 타겟의 거리와 속도에 대한 정보를 포함하는 비트 신호에 대해 신호 처리를 수행하는 MIMO FMCW(Multiple-Input Multiple-Output Frequency Modulated Continuous Wave) 레이더 시스템용 신호 처리 장치에서, 각 타겟 그리드에 대해 보상 행렬을 사용하는 포인트 단위 곱셈 연산을 수행하여 보상 결과 행렬을 획득하는 하나 이상의 포인트 단위 곱셈부; 상기 보상 결과 행렬에 스티어링 벡터를 곱셈 연산하는 하나 이상의 스티어링 벡터 곱셈부; 및 한 처프 내의 ADC 샘플 인덱스에 대해 고속푸리에 변환 처리 연산을 수행하고 병합 처리하여 거리-각도 응답을 획득하는 하나 이상의 FFT 처리-병합부를 포함하는 것을 특징으로 하는 MIMO FMCW 레이더 시스템용 신호 처리 장치. |
| 10 | 제9항에 있어서, 상기 보상 행렬은 추정하고자 하는 각도마다 정의되는 것을 특징으로 하는 MIMO FMCW 레이더 시스템용 신호 처리 장치. |
| 11 | 제9항에 있어서, 상기 보상 행렬 은, (여기서, 는 광속이고, 는 하나의 처프(chirp)내 ADC 샘플 수이고, 는 처프 신호의 대역폭이고, 는 안테나 간의 간격이고, 은 ADC 샘플 인덱스이고, 는 수신 안테나의 인덱스이고, 는 수신 안테나 수이다.)에 의해 정의되는 것을 특징으로 하는 MIMO FMCW 레이더 시스템용 신호 처리 장치. |
| 12 | 제9항에 있어서, 상기 보상 결과 행렬 은, (여기서, 는 아다마르 곱(Hadarmard product)을 의미한다.)에 의해 정의되는 것을 특징으로 하는 MIMO FMCW 레이더 시스템용 신호 처리 장치. |
| 13 | 제9항에 있어서, 상기 스티어링 벡터 는, (여기서, 는 수신 안테나 수이고, 이다.)에 의해 정의되는 것을 특징으로 하는 MIMO FMCW 레이더 시스템용 신호 처리 장치. |
| 14 | 제9항에 있어서, 상기 거리-각도 응답 은, 에 의해 정의되는 것을 특징으로 하는 MIMO FMCW 레이더 시스템용 신호 처리 장치. |
| 15 | 처프 지속 시간에 따라 주파수가 선형적으로 증가하는 FMCW 송신 신호를 송신 안테나를 통해 전송한 후 시간 지연된 FMCW 수신 신호를 수신 안테나를 통해 수신하여 타겟의 거리와 속도에 대한 정보를 포함하는 비트 신호에 대해 신호 처리를 수행하는 MIMO FMCW(Multiple-Input Multiple-Output Frequency Modulated Continuous Wave) 레이더 시스템용 신호 처리 방법으로서,각 타겟 그리드에 대해 보상 행렬을 사용하여 포인트 단위 곱셈 연산을 수행하여 보상 결과 행렬을 획득하는 단계; 상기 보상 결과 행렬에 스티어링 벡터를 곱셈 연산하는 단계; 및 한 처프 내의 ADC 샘플 인덱스에 대해 고속푸리에 변환 처리 연산을 수행하고 병합 처리하여 거리-각도 응답을 획득하는 단계를 포함하는 것을 특징으로 하는 MIMO FMCW 레이더 신호 처리 방법. |