| 번호 | 청구항 |
|---|---|
| 6 | 삭제 |
| 7 | 삭제 |
| 3 | 제2항에 있어서,상기 제2 접이식 링크에 연결되고, 상기 제2 접이식 링크에 대해 양 방향으로 각도가 조절되는 제2 접이식 관절; 및 상기 제2 접이식 관절에 연결되고, 흡착컵과 전개형 손가락을 포함하는 그리퍼를 더 포함하는 것을 특징으로 하는 접이식 하이브리드 구동 소프트 로봇 팔. |
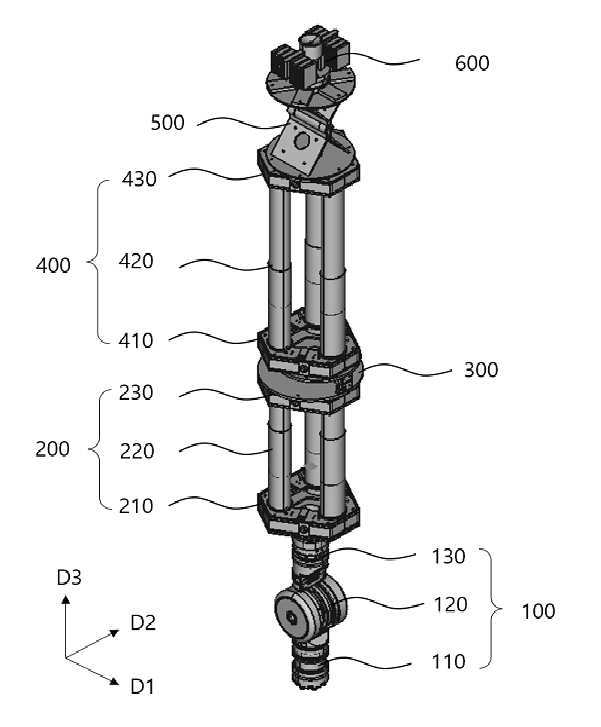
| 1 | 베이스부;상기 베이스부에 연결되고, 상기 베이스부로부터의 길이 및 상기 베이스부와 이루는 각도가 조절되는 제1 접이식 링크; 및상기 제1 접이식 링크에 연결되고, 상기 제1 접이식 링크에 대해 일 방향으로 각도가 조절되는 제1 접이식 관절을 포함하고,상기 제1 접이식 링크는 상기 베이스부에 연결되는 제1 강체 몸체;상기 제1 강체 몸체와 연결되고 각각이 길이를 조절할 수 있는 제1 내지 제3 소프트 액추에이터들; 및상기 제1 내지 제3 소프트 액추에이터들과 연결되는 제2 강체 몸체를 포함하고, 상기 제1 내지 제3 소프트 액추에이터들은 공압에 의해 구동되고,상기 제1 접이식 링크는상기 제2 강체 몸체에 설치되어, 상기 제2 강체 몸체의 회전 정도를 측정하는 IMU 센서; 및 상기 제1 내지 제3 소프트 액추에이터들 각각의 길이 변화를 측정하는 제1 내지 제3 소프트 센서를 더 포함하고,상기 제1 접이식 링크의 움직임에 따른 변위는 다음의 수학식 이용하여 측정되는 것을 특징으로 하는 접이식 하이브리드 구동 소프트 로봇 팔.(a) (b) (c) (d) (d)(e) 될 때까지 반복하여 p(x,y,z 변위)를 구함.(여기서 제1 강체 몸체의 중심 위치를 x0,y0,z0, 제2 강체 몸체의 중심 위치를 xc, yc, zc로 하고, Ai 는 반지름 R 의 원호 상의 i 지점으로 제1 강체 몸체의 소프트 센서가 부착되는 지점, Bi 는 반지름 r 의 원호 상의 i 지점으로 제2 강체 몸체의 소프트 센서가 부착되는 지점, T는 (xc, yc, zc)의 오일러 앵글, li2는 i 지점에서의 소프트센서의 길이의 제곱) |
| 2 | 제1항에 있어서,상기 제1 접이식 관절에 연결되고, 상기 제1 접이식 관절로부터의 길이 및 상기 제1 접이식과 이루는 각도가 조절되는 제2 접이식 링크를 더 포함하는 것을 특징으로 하는 접이식 하이브리드 구동 소프트 로봇 팔. |
| 4 | 삭제 |
| 5 | 삭제 |
| 8 | 제1항에 있어서,상기 베이스는 모터를 이용하여 제1 축을 기준으로 회전하는 제1 회전부;상기 제1 회전부와 연결되고, 모터를 이용하여 상기 제1 회전부에 대해 제2 축을 기준으로 회전하는 제2 회전부; 및상기 제2 회전부와 연결되고, 모터를 이용하여 상기 제2 회전부에 대해 제3 축을 기준으로 회전하는 제3 회전부를 포함하는 것을 특징으로 하는 접이식 하이브리드 구동 소프트 로봇 팔. |
| 9 | 제1항에 있어서,상기 제1 접이식 관절은,상기 제1 접이식 링크에 연결되는 제1 관절 강체 몸체;상기 제1 관절 강체 몸체에 연결되고, 일측이 신축 가능한 제1 관절 소프트 액추에이터; 및상기 제1 관절 소프트 액추에이터에 연결되는 제2 관절 강체 몸체를 더 포함하고, 상기 제1 관절 소프트 액추에이터의 신축에 따라 상기 제1 관절 강체 몸체와 상기 제1 관절강체 몸체가 이루는 각도가 조절되는 것을 특징으로 하는 접이식 하이브리드 구동 소프트 로봇 팔. |
| 10 | 제9항에 있어서,상기 제1 관절 소프트 액추에이터의 일측의 신축 정도를 측정하는 제1 관절 소프트 센서를 더 포함하는 것을 특징으로 하는 접이식 하이브리드 구동 소프트 로봇 팔. |
| 11 | 제10항에 있어서,상기 제1 접이식 관절의 상기 제1 관절 소프트 액추에이터는 공압에 의해 구동되는 것을 특징으로 하는 접이식 하이브리드 구동 소프트 로봇 팔. |
| 12 | 제1 강체 몸체;상기 제1 강체 몸체에 연결되는 소프트 액추에이터;상기 소프트 액추에이터 연결되는 제2 강체 몸체; 상기 제1 강체 몸체 및 상기 제2 강체 몸체 사이에 배치되어, 상기 제1 강체 몸체와 상기 제2 강체 몸체 사이의 길이를 측정하는 소프트 센서;상기 제2 강체 몸체의 회전 정도를 측정하는 IMU 센서; 및상기 소프트 센서와 상기 IMU 센서의 측정 신호를 수신하고, 이를 바탕으로 상기 소프트 액추에이터의 구동을 제어하는 제어부를 포함하고,상기 제1 접이식 링크의 움직임에 따른 변위는 다음의 수학식 이용하여 측정되는 것을 특징으로 하는 접이식 하이브리드 구동 소프트 로봇 팔의 제어 시스템.(a) (b) (c) (d) (d)(e) 될 때까지 반복하여 p(x,y,z 변위)를 구함.(여기서 제1 강체 몸체의 중심 위치를 x0,y0,z0, 제2 강체 몸체의 중심 위치를 xc, yc, zc로 하고, Ai 는 반지름 R 의 원호 상의 i 지점으로 제1 강체 몸체의 소프트 센서가 부착되는 지점, Bi 는 반지름 r 의 원호 상의 i 지점으로 제2 강체 몸체의 소프트 센서가 부착되는 지점, T는 (xc, yc, zc)의 오일러 앵글, li2는 i 지점에서의 소프트센서의 길이의 제곱) |
| 13 | 삭제 |
| 14 | 제12항에 있어서,상기 제어부에 의해 공압을 제어하는 레귤레이터를 더 포함하고, 상기 소프트 액추에이터는 상기 공압에 구동되는 것을 특징으로 하는 접이식 하이브리드 구동 소프트 로봇 팔의 제어 시스템. |
| 15 | 제12항에 있어서,베이스부를 더 포함하고, 상기 베이스부는모터를 이용하여 제1 축을 기준으로 회전하는 제1 회전부;상기 제1 회전부와 연결되고, 모터를 이용하여 상기 제1 회전부에 대해 제2 축을 기준으로 회전하는 제2 회전부; 및상기 제2 회전부와 연결되고, 모터를 이용하여 상기 제2 회전부에 대해 제3 축을 기준으로 회전하는 제3 회전부를 포함하고, 상기 제어부는 상기 모터들을 제어하는 것을 특징으로 하는 접이식 하이브리드 구동 소프트 로봇 팔의 제어 시스템. |
| 16 | 접이식 하이브리드 구동 소프트 로봇 팔의 각 구성들의 이동량을 산출하는 이동 위치 산출 단계;상기 이동 위치 산출 단계에서 계산된 각각 구성들의 변위에 대응하는 움직임이 가능하도록, 액추에이터 및 모터를 구동하는 액추에이터 및 모터 작동 단계; 및상기 접이식 하이브리드 구동 소프트 로봇 팔의 소프트 센서 및 IMU센서의 측정 신호를 바탕으로, 상기 각 구성들의 위치를 산출하는 위치 검출 단계를 포함하고,상기 하이브리드 구동 소프트 로봇 팔은 제1 접이식 링크를 포함하고, 상기 제1 접이식 링크는, 제1 강체 몸체;상기 제1 강체 몸체에 연결되는 소프트 액추에이터;상기 소프트 액추에이터 연결되는 제2 강체 몸체; 상기 제1 강체 몸체 및 상기 제2 강체 몸체 사이에 배치되어, 상기 제1 강체 몸체와 상기 제2 강체 몸체 사이의 길이를 측정하는 제1 내지 제3 소프트 센서;상기 제2 강체 몸체의 회전 정도를 측정하는 제1 IMU 센서를 포함하고, 상기 위치 검출 단계에서는, 상기 제1 접이식 링크의 움직임에 따른 변위를 산출하고, 상기 제1 접이식 링크의 움직임에 따른 변위는 다음의 수학식 이용하여 측정되는 것을 특징으로 하는 접이식 하이브리드 구동 소프트 로봇 팔의 제어 방법.(a) (b) (c) (d) (d)(e) 될 때까지 반복하여 p(x,y,z 변위)를 구함.(여기서 제1 강체 몸체의 중심 위치를 x0,y0,z0, 제2 강체 몸체의 중심 위치를 xc, yc, zc로 하고, Ai 는 반지름 R 의 원호 상의 i 지점으로 제1 강체 몸체의 소프트 센서가 부착되는 지점, Bi 는 반지름 r 의 원호 상의 i 지점으로 제2 강체 몸체의 소프트 센서가 부착되는 지점, T는 (xc, yc, zc)의 오일러 앵글, li2는 i 지점에서의 소프트센서의 길이의 제곱) |
| 17 | 삭제 |
| 18 | 제16항에 있어서, 상기 하이브리드 구동 소프트 로봇 팔은 베이스부를 더 포함하고, 상기 베이스부는 모터를 이용하여 제1 축을 기준으로 회전하는 제1 회전부;상기 제1 회전부와 연결되고, 모터를 이용하여 상기 제1 회전부에 대해 제2 축을 기준으로 회전하는 제2 회전부; 및상기 제2 회전부와 연결되고, 모터를 이용하여 상기 제2 회전부에 대해 제3 축을 기준으로 회전하는 제3 회전부를 더 포함하고, 상기 제1 접이식 링크는 상기 베이스부에 연결되고, 상기 액추에이터 및 모터 작동 단계에서는 상기 소프트 액추에이터와 상기 모터들을 구동하는 것을 특징으로 하는 접이식 하이브리드 구동 소프트 로봇 팔의 제어 방법. |