| 번호 | 청구항 |
|---|---|
| 3 | 제1항에 있어서, 상기 가상 앵커노드의 생성 위치는 상기 UAM의 3차원 초기 추정위치를 상기 운항경로 상에 정사영하였을 때 정해지는 위치인 것을 특징으로 하는 UAM의 3차원 측위 방법. |
| 4 | 제1항에 있어서, 상기 거리 추정 오차는 상기 UAM이 사전에 모델링된 상기 UAM의 운항경로를 이탈할 확률을 바탕으로 결정되는 것을 특징으로 하는 UAM의 3차원 측위 방법. |
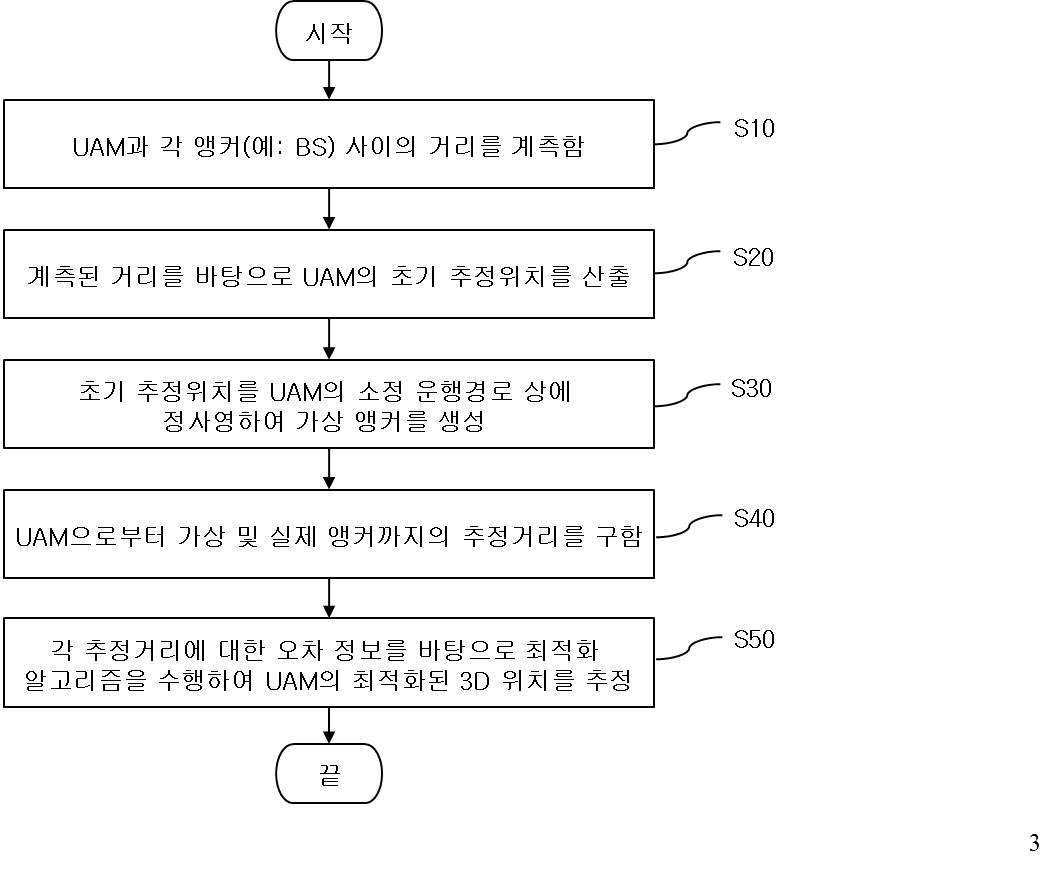
| 1 | 사전에 정해진 운항경로를 따라 비행하는 도심항공교통수단(UAM), 상기 UAM과 무선통신을 할 수 있고 상기 운항경로의 주변 지상의 소정 위치에 분산 설치된 적어도 N개의 앵커노드(단, N은 3이상의 자연수), 그리고 상기 적어도 N개의 앵커노드들과 통신할 수 있는 연산처리장치를 구비하는 UAM 측위 시스템에서, 상기 적어도 N개의 앵커노드들 각각이 상기 UAM 간의 거리를 계측하는 단계;상기 연산처리장치에서, 상기 UAM과 상기 적어도 N개의 앵커노드들 간의 계측된 거리 정보를 기반으로 소정의 3차원 측위 알고리즘을 이용하여 상기 UAM의 3차원 초기 추정위치를 구하는 단계;상기 연산처리장치에서, 구해진 3차원 초기 추정위치를 이용하여 상기 운항경로 상에 가상 앵커노드를 생성하는 단계;상기 연산처리장치에서, 상기 가상 앵커노드를 포함하는 N+1개의 앵커노드들로부터 상기 UAM까지의 추정 거리를 각각 산출하는 단계; 및상기 연산처리장치에서, 산출된 추정 거리에 대한 거리 추정 오차를 바탕으로 최적화 알고리즘을 수행하여 UAM의 최적화된 3D 위치 추정값을 구하는 단계를 포함하는 것을 특징으로 하는 UAM의 3차원 측위 방법. |
| 2 | 제1항에 있어서, 상기 거리를 계측하는 단계에서 각 앵커노드와 상기 UAM 간의 거리는 수신신호의 세기(received signal strength: RSS) 정보를 이용한 거리 추정법, 수신신호의 비행시간(Time of Flight: ToF) 정보를 이용한 거리 추정법, 수신신호의 도달시간(Time of Arrival: ToA) 정보를 이용한 거리추정법 중 적어도 어느 한 가지를 이용하여 구해지는 것을 특징으로 하는 UAM의 3차원 측위 방법. |
| 5 | 제1항에 있어서, 상기 최적화된 3D 위치 추정값을 구하는 단계는, 상기 연산처리장치에서, 산출된 추정 거리들을 바탕으로 거리 추정 오차의 표준편차를 구하는 단계; 및 상기 연산처리장치에서, 구해진 거리 추정 오차의 표준편차에 기초하여 상기 최적화 알고리즘을 적용하여 상기 UAM의 최적화된 3차원 위치 추정값을 구하는 단계를 포함하는 것을 특징으로 하는 UAM의 3차원 측위 방법. |
| 6 | 제1항에 있어서, 상기 최적화 알고리즘은 분산 가중 다차원 스케일링(distributed weighted Multi-Dimensional Scaling: dw-MDS) 기반 측위법 또는 최대가능도법(maximum likehood estimation: MLE) 기반 측위법인 것을 특징으로 하는 UAM의 3차원 측위 방법. |
| 7 | 제5항에 있어서, 상기 3차원 위치 추정값을 구하는 단계는 상기 UAM의 위치를 구하기 위해 가중 비용함수 S(X)를 로 정의하여 상기 가중 비용함수 S(X)를 최소화하는 위치행렬 X를 구하는 단계를 포함하고, 상기 위치행렬 X은 1개의 UAM과 N+1개의 앵커노드의 위치를 나타내는 행렬이고, 는 실제 측정을 통해 얻어진 i 번째와 j번째 노드 사이에 추정 거리를 나타내고, 는 X를 통해 구한 i 번째와 j번째 노드 사이 거리를 나타내며, wij는 i 번째와 j번째 노드 사이에 추정된 거리의 가중치를 나타내며, N은 실제 앵커노드의 개수를 나타내는 것을 특징으로 하는 UAM의 3차원 측위 방법. |
| 8 | 제7항에 있어서, 상기 위치행렬 X는 K번의 반복적인 행렬 연산을 통해 점진적으로 가중 비용함수 S(X)를 줄여나가 보다 정확한 위치 추정값을 얻는 기법인 SMACOF(scaling by majorizing a complicated function) 알고리즘을 통해 구해지는 것을 특징으로 하는 UAM의 3차원 측위 방법. |
| 9 | 제7항에 있어서, 상기 UAM이 x축을 따라 운항하는 것으로 가정할 때, 상기 가중치 wij는 상기 UAM과 N개 앵커노드 간 측정된 거리의 가중치 w1i와 상기 UAM과 가상 앵커노드 간 측정된 거리의 가중치 w1(N+2)로 구분되어 아래 식으로 정해지며, (단, i∈2, ..., N+1), 상기 식에서 wmax는 N+1개의 가중치 가운데 가장 큰 값을 나타내고, σij은 측정 거리 오차의 표준편차를 나타내며, σy와 σz은 사전에 지정된 운항경로와 상기 UAM의 실제 운항경로 사이의 y축 및 z축 오차를 가우시안 분포로 모델링할 경우 y축 및 z축에 대한 오차의 표준편차를 각각 나타내는 것을 특징으로 하는 UAM의 3차원 측위 방법. |
| 10 | 무선통신을 지원하는 제1 통신부를 구비하고, 사전에 정해진 운항경로를 따라 비행하는 UAM 장치; 상기 운항경로의 주변 지상의 소정 위치에 분산 설치되고, 상기 UAM과 무선통신을 통해 상기 UAM과의 이격거리를 산출할 수 있는 적어도 N개의 앵커노드(단, N은 3이상의 자연수)를 포함하는 앵커노드부; 그리고소정의 3D 측위 프로그램을 실행하여 상기 앵커노드부로부터 제공받은 복수의 앵커노드들과 상기 UAM간의 거리정보를 이용하여 상기 UAM의 3차원 위치 추정값을 산출하는 연산처리장치를 포함하며,상기 3D 측위 프로그램은, 상기 UAM과 상기 적어도 N개의 앵커노드들 간의 계측된 거리 정보를 기반으로 소정의 3차원 측위 알고리즘을 이용하여 상기 UAM의 3차원 초기 추정위치를 구하는 기능, 구해진 3차원 초기 추정위치를 이용하여 상기 운항경로 상에 가상 앵커노드를 생성하는 기능, 상기 가상 앵커노드를 포함하는 N+1개의 앵커노드들로부터 상기 UAM까지의 추정 거리를 각각 산출하는 기능, 그리고 산출된 추정 거리에 대한 거리 추정 오차를 바탕으로 최적화 알고리즘을 수행하여 UAM의 최적화된 3D 위치 추정값을 구하는 기능을 포함하는 것을 특징으로 하는 UAM의 3차원 측위 시스템. |
| 11 | 제10항에 있어서, 상기 가상 앵커노드의 생성 위치는 상기 UAM의 3차원 초기 추정위치를 상기 운항경로 상에 정사영하였을 때 정해지는 위치인 것을 특징으로 하는 UAM의 3차원 측위 시스템. |
| 12 | 제10항에 있어서, 상기 거리 추정 오차는 상기 UAM이 사전에 모델링된 상기 UAM의 운항경로를 이탈할 확률을 바탕으로 결정되는 것을 특징으로 하는 UAM의 3차원 측위 시스템. |
| 13 | 제10항에 있어서, 상기 최적화된 3D 위치 추정값을 구하는 기능은, 산출된 추정 거리들을 바탕으로 거리 추정 오차의 표준편차를 구하는 기능; 및 구해진 거리 추정 오차의 표준편차에 기초하여 상기 최적화 알고리즘을 적용하여 상기 UAM의 최적화된 3차원 위치 추정값을 구하는 기능을 포함하는 것을 특징으로 하는 UAM의 3차원 측위 시스템. |
| 14 | 제10항에 있어서, 상기 3차원 위치 추정값을 구하는 기능은, 상기 UAM의 위치를 구하기 위해 가중 비용함수 S(X)를 로 정의하여 상기 가중 비용함수 S(X)를 최소화하는 위치행렬 X를 구하는 기능을 포함할 수 있다. 여기서, 상기 위치행렬 X은 1개의 UAM과 N+1개의 앵커노드의 위치를 나타내는 행렬이고, 는 실제 측정을 통해 얻어진 i 번째와 j번째 노드 사이에 추정 거리를 나타내고, 는 X를 통해 구한 i 번째와 j번째 노드 사이 거리를 나타내며, wij는 i 번째와 j번째 노드 사이에 추정된 거리의 가중치를 나타내며, N은 실제 앵커노드의 개수를 나타내는 것을 특징으로 하는 UAM의 3차원 측위 시스템. |
| 15 | 제14항에 있어서, 상기 위치행렬 X는 K번의 반복적인 행렬 연산을 통해 점진적으로 가중 비용함수 S(X)를 줄여나가 보다 정확한 위치 추정값을 얻는 기법인 SMACOF(scaling by majorizing a complicated function) 알고리즘을 통해 구해지는 것을 특징으로 하는 UAM의 3차원 측위 시스템. |
| 16 | 제14항에 있어서, 상기 UAM이 x축을 따라 운항하는 것으로 가정할 때, 상기 가중치 wij는 상기 UAM과 N개 앵커노드 간 측정된 거리의 가중치 w1i와 상기 UAM과 가상 앵커노드 간 측정된 거리의 가중치 w1(N+2)로 구분되어 아래 식으로 정해지며, (단, i∈2, ..., N+1), 상기 식에서 wmax는 N+1개의 가중치 가운데 가장 큰 값을 나타내고, σij은 측정 거리 오차의 표준편차를 나타내며, σy와 σz은 사전에 지정된 운항경로와 상기 UAM의 실제 운항경로 사이의 y축 및 z축 오차를 가우시안 분포로 모델링할 경우 y축 및 z축에 대한 오차의 표준편차를 각각 나타내는 것을 특징으로 하는 UAM의 3차원 측위 시스템. |
| 17 | 제10항에 있어서, 상기 N개의 앵커노드 각각은, 무선통신 및 유선통신을 지원하는 제2 통신부; 및 상기 제2 통신부를 통해 상기 UAM과의 무선통신을 통해 획득한 통신정보를 이용하여 해당 앵커노드로부터 상기 UAM까지의 거리를 계측하는 거리 추정부를 구비하는 것을 특징으로 하는 UAM의 3차원 측위 시스템. |
| 18 | 제10항에 있어서, 상기 연산처리장치는, 상기 앵커노드부의 각 앵커노드의 제2 통신부와의 통신을 지원하는 제3 통신부; 상기 소정의 3D 측위 프로그램의 실행에 의해, 상기 제3 통신부를 통해 제공되는 각 앵커노드로부터 상기 UAM까지의 거리 정보를 이용하여 상기 UAM의 3차원 위치 추정값을 구하는 연산을 수행하는 연산부; 및 상기 운항경로에 대한 위치정보를 저장하면서 상기 UAM의 3차원 위치 추정을 위해 상기 연산부에 제공하는 데이터 저장부를 포함하는 것을 특징으로 하는 UAM의 3차원 측위 시스템. |