| 번호 | 청구항 |
|---|---|
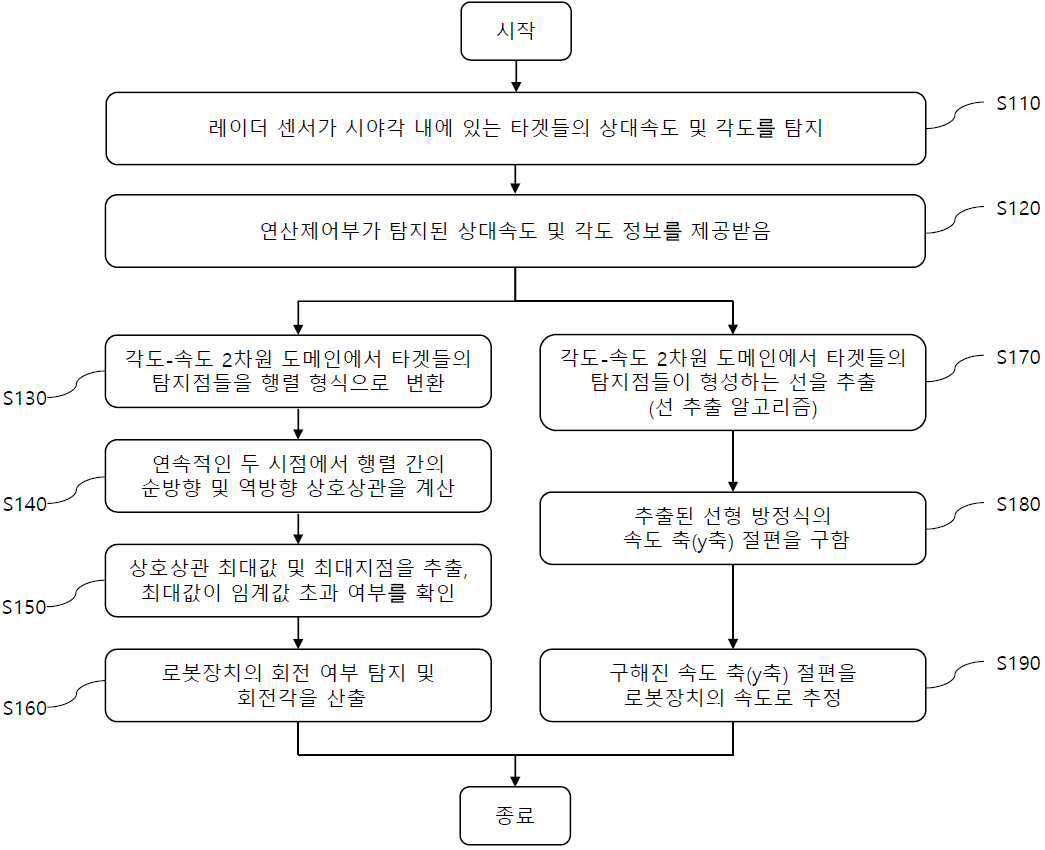
| 1 | 실내 공간에서 로봇장치에 장착된 레이더 센서가 레이더 신호를 방사하여 그 실내 공간의 타겟에 의해 반사된 레이더 신호를 수신하는 단계; 상기 레이더 센서의 각 스캔별 레이더 수신신호에 대하여 소정의 신호처리를 하여 실내공간에 존재하는 각 타겟과의 상대속도와 각도를 포함하는 '타겟관련정보'를 구하는 단계; 및연산제어부가 움직임 추정 알고리즘에 기반하여 각 스캔별 상기 타겟의 타겟관련정보만을 이용하여 상기 로봇장치의 속도와 회전각을 포함하는 상기 로봇장치의 자아 움직임 정보를 산출하는 단계를 구비하고,상기 로봇 장치의 자아 움직임 정보를 산출하는 단계는, 연산제어부가 상기 레이더 센서로부터 제공받은 상기 타겟관련정보로부터 시간상 연속된 시점에서 속도-각도 도메인에서의 타겟들의 탐지점들의 분포에 관한 상관관계를 추출하여 그 상관관계를 기반으로 상기 로봇 장치의 회전 각도를 산출하는 단계; 및 각도-속도의 2차원 도메인에서 타겟들의 탐지점들에 의해 형성된 추세선을 이용하여 상기 로봇 장치의 이동 속도를 산출하는 단계를 포함하며,상기 로봇 장치의 회전 각도를 산출하는 단계는, 각도-속도의 2차원 도메인에서 타겟들의 탐지점들을 이진값으로 구성된 행렬 데이터로 변환하는 단계; 시간에 따라 연속적으로 획득된 변환 행렬의 데이터 간의 순방향 및 역방향 상호상관의 크기를 계산하는 단계; 계산된 상호상관의 크기 중에서 최대값을 구하고 그 상호상관 최대값의 행렬 인덱스를 추출하는 단계; 및 추출된 상호상관 최대값의 행렬 인덱스를 이용하여 상기 로봇장치의 회전각도를 구하는 단계를 포함하는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 방법. |
| 2 | 제1항에 있어서, 산출된 상기 로봇장치의 자아 움직임 정보와 타겟관련정보를 결합하여 동시적 위치 추정 및 지도 작성(SLAM)을 수행하는 단계를 더 포함하는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 방법. |
| 3 | 제1항에 있어서, 상기 수신하는 단계는 상기 레이더 센서가 FMCW 방식의 레이더 신호로서 단거리 타겟 탐지용 레이더 신호와 장거리 타겟 탐지용 레이더 신호를 함께 전송하는 단계를 포함하는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 방법. |
| 4 | 제1항에 있어서, 상기 수신하는 단계는 상기 로봇장치가 실내 공간 내에서 선형 및 회전 이동을 수행하면서 상기 레이더 센서가 주기적으로 스캐닝하여 주변에 존재하는 타겟들에 관한 신호를 수집하는 단계를 포함하는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 방법. |
| 5 | 삭제 |
| 6 | 삭제 |
| 7 | 제1항에 있어서, 상기 행렬 형식으로 변환하는 단계는, 탐지된 타겟의 상대속도와 각도 값을 분해능에 따라 양자화하는 단계; 양자화된 각도 및 속도 값 목록을 생성하는 단계; 각도-속도 2차원 도메인(영역)을 Nθ×Nv 영역으로 분할하는 단계 (단, Nθ와 Nv는 양자화된 각도 목록과 속도 목록에서의 점의 개수를 각각 나타냄); 각도와 속도의 양자화 값들에 대응하여 상기 각도 목록과 상기 속도 목록으로부터 인덱스를 추출하는 단계; 양자화된 상대속도 및 각도 값과 양자화된 각도 및 속도 값 목록을 비교하여 Nθ×Nv 크기의 상기 변환 행렬을 생성하는 단계를 포함하는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 방법. |
| 8 | 제7항에 있어서, 상기 변환 행렬을 생성 시 양자화된 점이 영역 내부에 존재하면 그 변환 행렬의 원소 값을 1로 부여하고 그렇지 않으면 0으로 부여하는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 방법. |
| 9 | 제1항에 있어서, 상기 순방향 상호상관을 계산하기 위해 오른쪽 제로 패딩된 행렬을 사용하고, 상기 역방향 상호상관을 계산하기 위해 왼쪽 제로 패딩된 행렬을 사용하는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 방법. |
| 10 | 제1항에 있어서, 상기 회전각을 산출할 때 상기 상호상관 최대값이 소정 크기의 임계값을 초과하는지 여부를 확인하여, 초과하는 경우에만 상기 로봇장치가 회전한 것으로 판단하여 상기 회전각을 산출하고, 그렇지 않은 경우에는 상기 회전각을 0으로 결정하는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 방법. |
| 11 | 제1항에 있어서, 상기 로봇 장치의 이동 속도를 산출하는 단계는 선형회귀를 수행하여 상기 타겟들의 탐지점들에 대한 추세선의 선형방정식을 구하는 단계; 및 구해진 상기 선형 방정식을 이용하여 상기 추세선의 속도축 절편을 구하여 상기 로봇 장치의 자아 속도로 추정하는 단계를 포함하는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 방법. |
| 12 | 제1항에 있어서, 상기 로봇 장치의 자아 움직임 정보를 산출하는 단계는, 추정된 회전각도를 이용하여 요레이트(yaw rate)를 산출하는 단계를 더 포함하고, 상기 요레이트는 상기 추정된 회전각도를 상호상관을 계산하는 데 사용되는 두 지점 사이의 지속시간으로 나눈 값으로 정해지는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 방법. |
| 13 | 선형 운동 및 회전 운동이 가능한 로봇 장치;상기 로봇장치에 장착되어, 레이더 신호를 방사하여 자신이 위치한 실내 공간의 타겟에 의해 반사된 레이더 신호를 수신하고, 각 스캔별 레이더 수신신호에 대하여 소정의 신호처리를 하여 실내공간에 존재하는 각 타겟과의 상대속도와 각도를 포함하는 '타겟관련정보'를 산출하도록 구성된 레이더 센서; 및상기 레이더 센서로부터 상기 타겟관련정보를 제공받고, 움직임 추정 알고리즘에 기반하여 각 스캔별 상기 타겟의 타겟관련정보만을 이용하여 상기 로봇장치의 속도와 회전각을 포함하는 상기 로봇장치의 자아 움직임 정보를 산출하도록 구성된 연산제어부를 구비하고,상기 연산제어부는 상기 로봇 장치의 자아 움직임 정보의 산출을 위해, 상기 레이더 센서로부터 제공받은 상기 타겟관련정보로부터 시간상 연속된 시점에서 속도-각도 도메인에서의 타겟들의 탐지점들의 분포에 관한 상관관계를 추출하여 그 상관관계를 기반으로 상기 로봇 장치의 회전 각도를 산출하는 것과, 각도-속도의 2차원 도메인에서 타겟들의 탐지점들에 의해 형성된 추세선을 이용하여 상기 로봇 장치의 이동 속도를 산출하는 것을 수행하도록 구성되고, 상기 연산제어부는 또한, 상기 로봇 장치의 회전 각도를 산출하기 위해, 각도-속도의 2차원 도메인에서 타겟들의 탐지점들을 이진값으로 구성된 행렬 데이터로 변환하고; 시간에 따라 연속적으로 획득된 변환 행렬의 데이터 간의 순방향 및 역방향 상호상관의 크기를 계산하고; 계산된 상호상관의 크기 중에서 최대값을 구하고 그 상호상관 최대값의 행렬 인덱스를 추출하고; 그리고 추출된 상호상관 최대값의 행렬 인덱스를 이용하여 상기 로봇장치의 회전각도를 구하도록 구성되는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 시스템. |
| 14 | 제13항에 있어서, 상기 연산제어부는 산출된 상기 로봇장치의 자아 움직임 정보와 타겟관련정보를 결합하여 동시적 위치 추정 및 지도 작성(SLAM)을 수행하도록 구성된 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 시스템. |
| 15 | 삭제 |
| 16 | 삭제 |
| 17 | 제13항에 있어서, 상기 연산제어부는, 상기 순방향 상호상관을 계산하기 위해 오른쪽 제로 패딩된 행렬을 사용하고, 상기 역방향 상호상관을 계산하기 위해 왼쪽 제로 패딩된 행렬을 사용하도록 구성되는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 시스템. |
| 18 | 제13항에 있어서, 상기 연산제어부는, 상기 회전각도를 산출할 때 상기 상호상관 최대값이 소정 크기의 임계값을 초과하는지 여부를 확인하여, 초과하는 경우에만 상기 로봇장치가 회전한 것으로 판단하여 상기 회전각을 산출하고, 그렇지 않은 경우에는 상기 회전각을 0°로 결정하도록 구성되는 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 시스템. |
| 19 | 제13항에 있어서, 상기 연산제어부는, 상기 로봇 장치의 이동 속도를 추정하기 위해, 선형회귀를 수행하여 상기 타겟들의 탐지점들에 대한 추세선의 선형방정식을 구하고; 그리고 구해진 상기 선형 방정식을 이용하여 상기 추세선의 속도축 절편을 구하여 그 구해진 속도축 절편을 상기 로봇 장치의 자아 속도로 추정하도록 구성된 것을 특징으로 하는 레이더 기반 자동 로봇의 자아 움직임 추정 시스템. |
| 20 | 제1항 내지 제4항과 제7항 내지 제12항 중 어느 한 항에 기재된 레이더 기반 자동 로봇의 자아 움직임 추정 방법을 수행하기 위하여 컴퓨터 판독 가능한 기록 매체에 저장된 컴퓨터 실행가능 프로그램. |
| 21 | 제1항 내지 제4항과 제7항 내지 제12항 중 어느 한 항에 기재된 레이더 기반 자동 로봇의 자아 움직임 추정 방법을 수행하기 위한 컴퓨터 프로그램이 기록된 컴퓨터 판독 가능한 기록 매체. |