| 번호 | 청구항 |
|---|---|
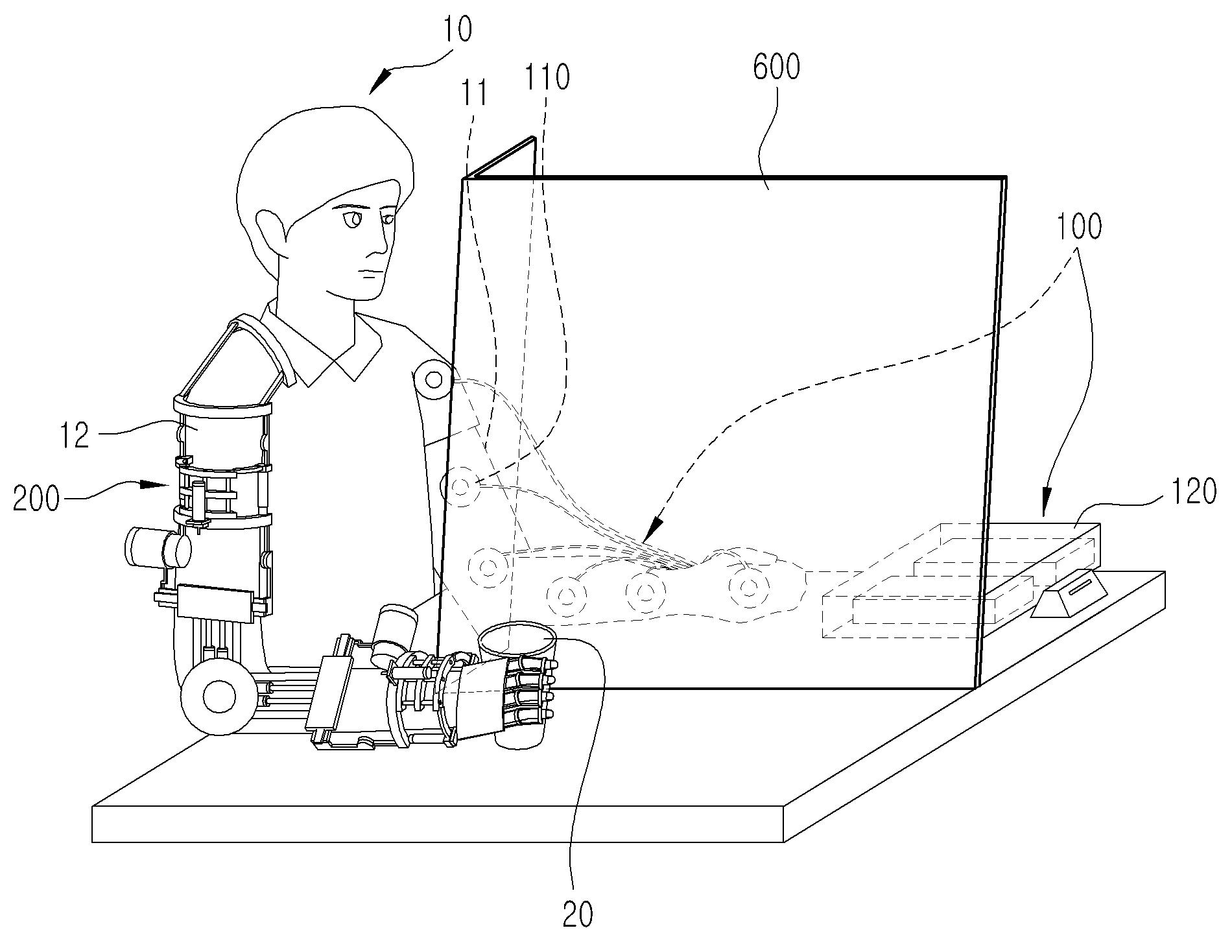
| 1 | 대상의 편마비측 신체를 치료하기 위한 편마비 치료 장치에 있어서,상기 편마비측 신체에 착용되는 로봇;상기 대상의 건측 신체의 움직임을 측정하는 모션 측정부; 및상기 로봇 및 상기 모션 측정부와 연결되는 제어부를 포함하며,상기 제어부는, 상기 모션 측정부에서 측정한 건측 신체의 움직임을 입력받아 상기 편마비측 신체가 상기 건측 신체의 움직임과 상응하게 움직이도록 상기 로봇을 제어하며,상기 대상의 뇌가 인지하는 상기 편마미측 신체가 정상적으로 움직인다는 시각적인 착각 정도를 강화하여 뇌가소성의 유도가 극대화되도록, 상기 대상이 상기 건측 신체의 움직임은 볼 수 없게 하면서 상기 편마비측 신체의 움직임은 볼 수 있게 하는 가림막을 더 포함하는,편마비 치료 장치. |
| 2 | 대상의 편마비측 신체를 치료하기 위한 편마비 치료 장치에 있어서,상기 편마비측 신체에 착용되는 로봇;상기 대상의 건측 신체의 움직임을 측정하는 모션 측정부; 및상기 로봇 및 상기 모션 측정부와 연결되는 제어부를 포함하며,상기 제어부는, 상기 모션 측정부에서 측정한 건측 신체의 움직임을 입력받아 상기 편마비측 신체가 상기 건측 신체의 움직임과 상응하게 움직이도록 상기 로봇을 제어하며,상기 대상의 뇌가 인지하는 상기 편마미측 신체가 정상적으로 움직인다는 시각적인 착각 정도를 강화하여 뇌가소성의 유도가 극대화되도록, 상기 대상이 상기 건측 신체의 움직임은 볼 수 없게 하면서 상기 편마비측 신체의 움직임은 볼 수 있게 하는 가림 안경을 더 포함하는,편마비 치료 장치. |
| 3 | 삭제 |
| 4 | 삭제 |
| 5 | 삭제 |
| 6 | 삭제 |
| 7 | 삭제 |
| 8 | 제 1 항 또는 제 2 항에 있어서,상기 로봇이 착용된 상기 편마비측 신체는 상기 제어부의 제어에 의해 실시간으로 상기 건측 신체의 움직임에 상응하게 움직이는 것을 특징으로 하는,편마비 치료 장치. |
| 9 | 제 1 항 또는 제 2 항에 있어서,상기 로봇이 착용된 상기 편마비측 신체는, 상기 모션 측정부에 의해 측정되어 상기 제어부에 기저장된 상기 건측 신체의 움직임에 상응하게 움직이는 것을 특징으로 하는,편마비 치료 장치. |
| 10 | 제 1 항 또는 제 2 항에 있어서,상기 모션 측정부는 모션 캡쳐 장치인 것을 특징으로 하는,편마비 치료 장치. |
| 11 | 제 10 항에 있어서,상기 모션 캡쳐 장치는,상기 건측 신체에 부착된 다수의 마커;상기 다수의 마커의 이동을 촬영하는 카메라; 및상기 카메라에 의해 촬영된 상기 다수의 마커의 이동을 이용해 디지털 표현(digital representation)을 생성하는 모션 캡쳐 프로세서를 포함하며,상기 모션 캡쳐 프로세서에 의해 생성된 디지털 표현은 상기 제어부에 입력되고, 상기 제어부는 상기 입력된 디지털 표현에 따라 상기 로봇을 제어하는 것을 특징으로 하는,편마비 치료 장치. |
| 12 | 제 10 항에 있어서,상기 모션 캡쳐 장치는,상기 건측 신체의 움직임을 촬영하는 카메라; 및상기 카메라에 의해 촬영된 상기 건측 신체의 움직임을 이용해 디지털 표현을 생성하는 모션 캡쳐 프로세서를 포함하며,상기 모션 캡쳐 프로세서에 의해 생성된 디지털 표현은 상기 제어부에 입력되고, 상기 제어부는 상기 입력된 디지털 표현에 따라 상기 로봇을 제어하는 것을 특징으로 하는,편마비 치료 장치. |
| 13 | 제 1 항 또는 제 2 항에 있어서,상기 모션 측정부는 근전도(EMG) 센서이며,상기 근전도 센서는 상기 건측 신체의 근전도 신호를 수신하여 상기 건측 신체의 움직임을 측정하는 것을 특징으로 하는,편마비 치료 장치. |
| 14 | 제 1 항 또는 제 2 항에 있어서,상기 모션 측정부는 관성 측정 장치(IMU) 또는 자세 측정 장치(AHRS)인 것을 특징으로 하는,편마비 치료 장치. |
| 15 | 제 1 항 또는 제 2 항에 있어서,상기 신체는 상지이며,상기 로봇은,상기 상지의 어깨에 고정되는 견착부;상기 견착부와 일단에서 연결되며, 상기 상지의 상박에 고정되는 상박고정부;상기 상박고정부의 타단과 연결되는 관절부;상기 관절부와 일단에서 연결되며, 상기 상지의 하박에 고정되는 하박고정부; 및상기 하박고정부의 타단과 연결되며, 상기 상지의 손이 위치하는 그립부를 포함하며,상기 관절부는 상기 제어부의 제어에 따라 상기 하박고정부를 상기 상박고정부에 대하여 회전 이동시키는 것을 특징으로 하는,편마비 치료 장치. |
| 16 | 제 1 항 또는 제 2 항에 있어서,상기 신체는 하지이며,상기 로봇은,상기 신체의 허리에 고정되는 허리고정부;상기 허리고정부와 일단에서 연결되며, 상기 하지의 대퇴부에 고정되는 대퇴고정부;상기 대퇴고정부의 타단과 연결되는 슬관절부;상기 슬관절부와 일단에서 연결되며, 상기 하지의 하퇴부에 고정되는 하퇴고정부; 및상기 하퇴고정부의 타단과 연결되며, 상기 하지의 발이 위치하는 신발부를 포함하며,상기 슬관절부는 상기 제어부의 제어에 따라 상기 하퇴고정부를 상기 대퇴고정부에 대하여 회전 이동시키는 것을 특징으로 하는,편마비 치료 장치. |