| 번호 | 청구항 |
|---|---|
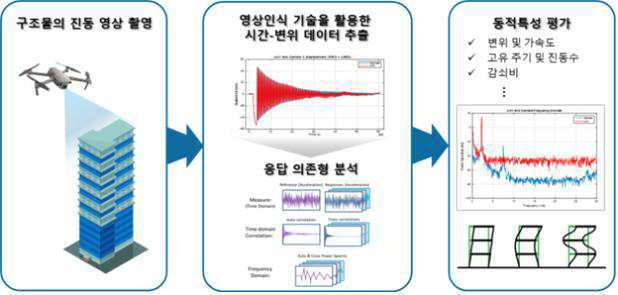
| 1 | 상시 진동하는 대상 구조물의 움직임을 대표할 수 있는 촬영영역을 파악하는 단계와;무인비행체에 탑재된 영상장치를 이용하여 상기 대상 구조물의 촬영영역을 촬영하는 단계와; 상기 영상장치에 의하여 촬영된 영상을 분석하여 시간-변위 데이터를 추출하는 단계와;상기 시간-변위 데이터를 기반으로 상기 구조물의 동적특성을 파악하는 단계;를 포함하는 것을 특징으로 하는 무인비행체와 영상인식 기술을 이용한 동적특성 평가방법. |
| 2 | 제 1 항에 있어서,상기 구조물의 동적특성을 파악하는 단계는, 상기 시간-변위 데이터를 기반으로 응답 의존형 해석(OMA)을 수행하여 상기 구조물의 동적특성을 파악하는 것을 특징으로 하는 무인비행체와 영상인식 기술을 이용한 동적특성 평가방법. |
| 3 | 제 1 항에 있어서,상기 시간-변위 데이터를 추출하는 단계는, 영상인식기술을 통하여 상기 영상장치에 의하여 촬영된 영상을 분석하여 상기 구조물의 상시 진동에 대한 시간-변위 데이터를 추출하는 것을 특징으로 하는 무인비행체와 영상인식 기술을 이용한 동적특성 평가방법. |
| 4 | 제 3 항에 있어서,상기 시간-변위 데이터를 추출하는 단계는, 상기 무인비행체의 움직임에 따른 카메라 왜곡을 보정하는 단계와,상기 구조물에 대한 측정점을 설정하여 객체를 추적하는 단계와, 추적된 객체의 시간-변위 데이터를 추출하는 단계를 포함하는 것을 특징으로 하는 무인비행체와 영상인식 기술을 이용한 동적특성 평가방법. |
| 5 | 상시 진동하는 대상 구조물의 움직임을 대표할 수 있는 촬영영역을 파악하는 파악부와;무인비행체에 탑재된 영상장치를 이용하여 상기 대상 구조물의 촬영영역을 촬영하는 촬영부와;영상인식기술을 통하여 상기 영상장치에 의하여 촬영된 영상을 분석하여 상기 구조물의 상시 진동에 대한 시간-변위 데이터를 추출하는 추출부와;상기 시간-변위 데이터를 기반으로 응답 의존형 해석(OMA)을 수행하여 상기 구조물의 동적특성을 파악하는 분석부;를 포함하는 것을 특징으로 하는 무인비행체와 영상인식 기술을 이용한 동적특성 평가시스템. |
| 6 | 상기 추출부는,상기 무인비행체의 움직임에 따른 카메라 왜곡을 보정하고, 상기 구조물에 대한 측정점을 설정하여 객체를 추적하여 추적된 객체의 시간-변위 데이터를 추출하며, 상기 구조물 외부에 기준점을 설정한 후 상기 무인비행체가 정지 비행상태에서 상기 구조물과 상기 기준점을 동시에 촬영한 후 기준점을 토대로 상기 구조물과의 상호관계를 분석하여 상기 무인비행체의 자체 움직임에 따른 카메라 왜곡을 보정하고,상기 구조물에 대한 측정점으로 관심영역을 설정하고, 상기 관심영역 내 특징점을 추출한 후 상기 특징점의 평균점을 추적하여 객체를 추적하는 것을 특징으로 하는 무인비행체와 영상인식 기술을 이용한 동적특성 평가시스템. |