| 번호 | 청구항 |
|---|---|
| 1 | 대상물과 접촉하는 접촉부,상기 접촉부와 연결되며, 서로 제1 사이각을 가지며 연결되어 상기 접촉부가 지면과 접촉하는 경우 수동적으로 회전하여 상기 접촉부를 수직 방향으로 이동시키는 상부 마디부 및 하부 마디부를 포함하는 제1 구동 메커니즘, 그리고상기 제1 구동 메커니즘에 연결되는 링크 유니트와, 상기 링크 유니트에 연결되며 상기 접촉부를 가압하여 상기 대상물을 파지하는 제1 가압부, 그리고 상기 하부 마디부에 연결되며 상기 접촉부를 수동적으로 회전시켜 상기 대상물을 비집기(scooping)하는 제2 가압부를 포함하는 제2 구동 메커니즘을 포함하는 척. |
| 2 | 제1항에서,상기 제1 구동 메커니즘은 상기 상부 마디부와 상기 하부 마디부에 연결되어 복원력을 제공하는 제1 탄성 부재를 더 포함하는, 척. |
| 3 | 제2항에서,상기 제1 탄성 부재는 비틀림 스프링을 포함하는, 척. |
| 4 | 제1항에서,상기 접촉부는 상기 하부 마디부의 하단부에 연결되는, 척. |
| 5 | 제1항에서,상기 상부 마디부의 상단부와 상기 접촉부의 하단부 사이의 굴절 간격이 변화함에 따라 상기 제1 사이각이 변화하는, 척. |
| 6 | 제1항에서,상기 제1 가압부 및 상기 제2 가압부가 동시에 상기 접촉부를 가압하는 경우 상기 접촉부는 수직 상태를 유지하며, 상기 제2 가압부만이 상기 접촉부를 가압하는 경우 상기 접촉부는 회전하여 경사진 상태를 가지는, 척. |
| 7 | 제1항에서,상기 링크 유니트는 상기 상부 마디부에 대응하는 상부 링크, 그리고상기 하부 마디부에 대응하는 하부 링크를 포함하고,상기 제1 사이각의 변화에 대응하여 상기 상부 링크와 상기 하부 링크 사이의 제2 사이각은 변화하는, 척. |
| 8 | 제7항에서,상기 상부 마디부와 상기 상부 링크는 함께 평행사변형 형상을 구성하고, 상기 하부 마디부와 상기 하부 링크는 함께 평행사변형 형상을 구성하는, 척. |
| 9 | 제7항에서,상기 제2 구동 메커니즘은 상기 하부 링크와 상기 접촉부에 연결되어 복원력을 제공하는 제2 탄성 부재를 더 포함하는, 척. |
| 10 | 제9항에서,상기 제2 탄성 부재는 인장 스프링을 포함하는, 척. |
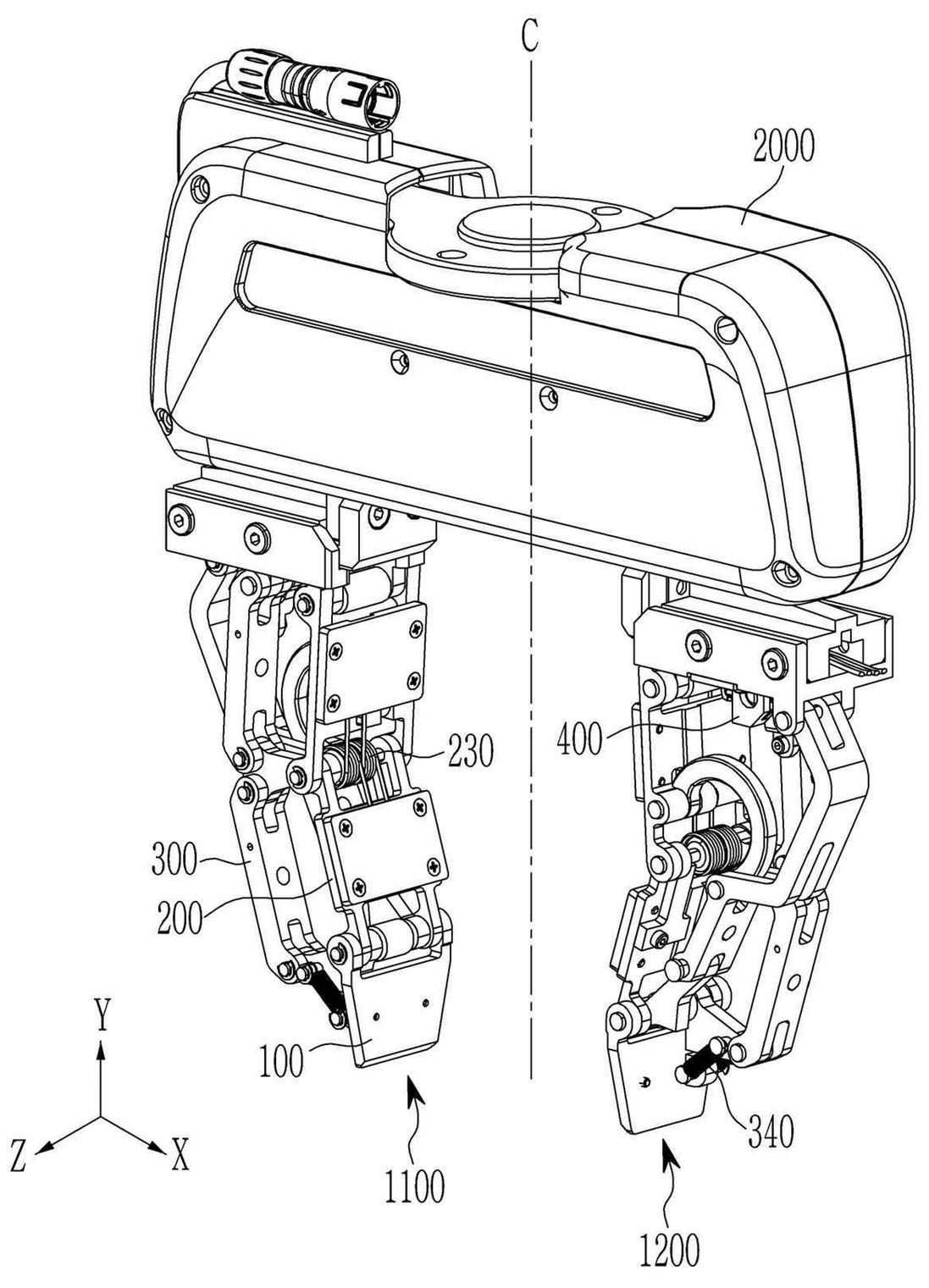
| 11 | 대상물과 접촉하는 접촉부,상기 접촉부와 연결되며, 서로 제1 사이각을 가지며 연결되어 상기 접촉부가 지면과 접촉하는 경우 수동적으로 회전하여 상기 접촉부를 수직 방향으로 이동시키는 상부 마디부 및 하부 마디부를 포함하는 제1 구동 메커니즘, 및상기 제1 구동 메커니즘에 연결되는 링크 유니트와, 상기 링크 유니트에 연결되며 상기 접촉부를 가압하여 상기 대상물을 파지하는 제1 가압부, 그리고 상기 하부 마디부에 연결되며 상기 접촉부를 수동적으로 회전시켜 상기 대상물을 비집기(scooping)하는 제2 가압부를 포함하는 제2 구동 메커니즘을 포함하는 척; 그리고상기 척이 장착되며, 상기 척을 수평 방향으로 이동시키도록 구성된 병렬형 구동 모듈을 포함하는 병렬형 그리퍼. |
| 12 | 제11항에서,상기 제1 구동 메커니즘은 상기 상부 마디부와 상기 하부 마디부에 연결되어 복원력을 제공하는 제1 탄성 부재를 더 포함하는, 병렬형 그리퍼. |
| 13 | 제11항에서,상기 접촉부는 상기 하부 마디부의 하단부에 연결되는, 병렬형 그리퍼. |
| 14 | 제11항에서,상기 상부 마디부의 상단부와 상기 접촉부의 하단부 사이의 굴절 간격이 변화함에 따라 상기 제1 사이각이 변화하는, 병렬형 그리퍼. |
| 15 | 제14항에서,상기 상부 마디부에 설치되어 상기 굴절 간격을 측정하는 포텐시오미터를 더 포함하는 병렬형 그리퍼. |
| 16 | 제11항에서,상기 제1 가압부 및 상기 제2 가압부가 동시에 상기 접촉부를 가압하는 경우 상기 접촉부는 수직 상태를 유지하며, 상기 제2 가압부만이 상기 접촉부를 가압하는 경우 상기 접촉부는 회전하여 경사진 상태를 가지는, 병렬형 그리퍼. |
| 17 | 제11항에서,상기 링크 유니트는 상기 상부 마디부에 대응하는 상부 링크, 그리고상기 하부 마디부에 대응하는 하부 링크를 포함하고,상기 제1 사이각의 변화에 대응하여 상기 상부 링크와 상기 하부 링크 사이의 제2 사이각은 변화하는, 병렬형 그리퍼. |
| 18 | 제17항에서,상기 제2 구동 메커니즘은 상기 하부 링크와 상기 접촉부에 연결되어 복원력을 제공하는 제2 탄성 부재를 더 포함하는, 병렬형 그리퍼. |