| 번호 | 청구항 |
|---|---|
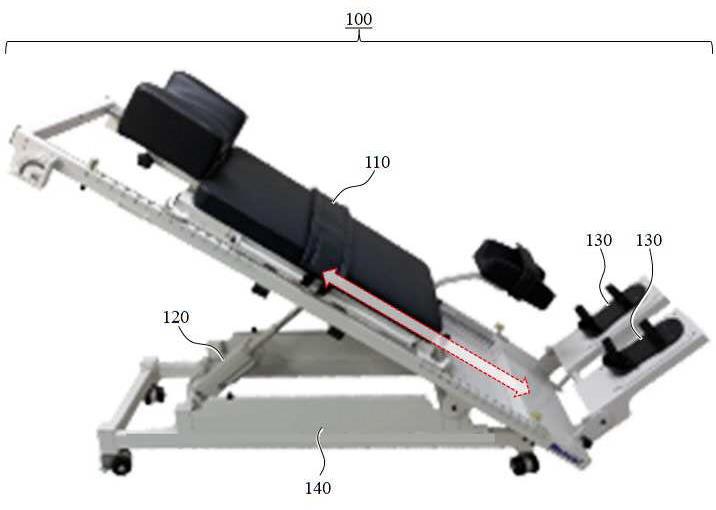
| 1 | 대상 환자의 등을 지지함과 동시에 지면으로부터 소정 각도를 형성하는 경사면을 구조를 형성하고, 대상 환자의 몸통과 결착되어 대상 환자의 스쿼트 운동에 의해 상하 방향으로 슬라이딩 왕복 운동하는 구조의 등지지부(110);상기 등지지부(110)의 하부에 장착되고, 제어부(140)로부터 전달된 제어신호에 의해 등지지부(110)의 경사면 각도를 변경하는 구조의 운동강도 조절부(120);상기 등지지부(110)의 하부에 장착되고, 대상 환자의 발이 안착될 수 있는 구조이며, 대상 환자의 발의 다수의 부분으로부터 가해지는 압력을 실시간으로 검출하여 제어부(140)에 전달하는 구조의 발판형 매트 센서부(130); 및상기 운동강도 조절부(120)의 일측에 장착되고, 발판형 매트 센서부(130)로부터 전달되는 데이터와 기설정된 기준값을 바탕으로 운동강도 조절부(120)의 작동을 제어하는 구조의 제어부(140);를 포함하는 것을 특징으로 하는 슬라이딩 재활로봇 시스템. |
| 2 | 제1항에 있어서,상기 발판형 매트 센서부(130)는,상기 등지지부(110)의 하단에 탈착 가능한 구조로 장착되고, 대상 환자의 발이 안착될 수 있도록, 대상 환자의 발 외주면과 대응되는 판상형 구조의 발판본체부(130a);상기 발판본체부(130a)의 상부면에 장착되고, 대상 환자의 발의 앞부분과 과 면접촉하는 위치에 배치되며, 좌우방향으로 일정 간격 이격되어 다수 장착되며, 발의 앞부분으로부터 전달되는 압력을 실시간으로 검출하는 제1검출센서(131);상기 발판본체부(130a)의 상부면에 장착되고, 대상 환자의 발의 엄지발가락과 면접촉하는 위치에 배치되며, 엄지발가락으로부터 전달되는 압력을 실시간으로 검출하는 제2검출센서(132);상기 발판본체부(130a)의 상부면에 장착되고, 대상 환자의 발의 뒷부분과 면접촉하는 위치에 배치되며, 좌우방향으로 일정 간격 이격되어 다수 장착되며, 발의 뒷부분으로부터 전달되는 압력을 실시간으로 검출하는 제3검출센서(133); 및상기 발판본체부(130a)의 상부면에 장착되고, 대상 환자의 발의 뒤꿈치 부분과 면접촉하는 위치에 배치되며, 발의 뒤꿈치 부분으로부터 전달되는 압력을 실시간으로 검출하는 제4검출센서(134);를 포함하는 것을 특징으로 하는 슬라이딩 재활로봇 시스템. |
| 3 | 제2항에 있어서,상기 제어부(140)는,상기 발판형 매트 센서부(130)의 제1검출센서(131), 제2검출센서(132), 제3검출센서(133) 및 제4검출센서(134)로부터 획득한 실시간 데이터를 바탕으로 기 설정된 제1기준 주기 동안의 압력값 패턴을 산출하고,제2기준 주기 동안 압력값 패턴이 일정하게 유지될 경우, 운동강도 조절부(120)에 현재 운동강도를 유지하거나 현재 운동강도를 상향 조정하도록 제어 신호를 전송하며,제2기준 주기 동안 압력값 패턴이 일정하게 유지되지 못할 경우, 운동강도 조절부(120)에 현재 운동강도를 하향 조정하도록 제어 신호를 전송하는 것을 특징으로 하는 슬라이딩 재활로봇 시스템. |
| 4 | 제3항에 있어서,상기 제어부(140)는,상기 제2기준 주기 동안 압력값 패턴이 일정하게 유지되지 못할 경우, 등지지부(110)의 슬라이딩 왕복 운동하는 부분의 작동을 강제 정지한 후, 기설정된 경고 알람을 출력하는 것을 특징으로 하는 슬라이딩 재활로봇 시스템. |
| 5 | 제4항에 있어서,상기 발판형 매트 센서부(130)는,상기 발판본체부(130a)의 상부면에 장착되고, 소정 크기의 탄성복원력을 가지는 유연한 소재로 구성되며, 소정 크기의 마찰력을 가지는 구조의 마찰패드층(135);상기 발판본체부(130a)의 정중앙부에 형성되고, 대상 환자의 발 바닥의 오목한 부분과 대응되는 위치에 형성된 중앙관통구(136a);상기 발판본체부(130a)의 전방에 형성되고, 대상 환자의 발 바닥의 앞부분과 대응되는 위치에 형성된 전방관통구(136b);상기 발판본체부(130a)의 후방에 형성되고, 대상 환자의 발 바닥의 뒷부분과 대응되는 위치에 형성된 후방관통구(136c);상기 발판본체부(130a)의 후방에 형성되고, 대상 환자의 발 뒤꿈치의 둘레와 대응되는 위치에 형성된 뒤꿈치관통구(136d);상기 발판본체부(130a)의 내부에 장착되고, 외부로부터 공급되는 압축 공기에 의해 팽창하여 중앙관통구(136a)를 통해 돌출되어 대상 환자의 발 바닥의 오목한 부분을 가압하는 구조의 제1팽창구동부(137a);상기 발판본체부(130a)의 내부에 장착되고, 외부로부터 공급되는 압축 공기에 의해 팽창하여 전방관통구(136b)를 통해 돌출되어 대상 환자의 발 바닥의 앞부분을 가압하는 구조의 제2팽창구동부(137b);상기 발판본체부(130a)의 내부에 장착되고, 외부로부터 공급되는 압축 공기에 의해 팽창하여 후방관통구(136c)를 통해 돌출되어 대상 환자의 발 바닥의 뒷부분을 가압하는 구조의 제3팽창구동부(137c); 및상기 발판본체부(130a)의 내부에 장착되고, 외부로부터 공급되는 압축 공기에 의해 팽창하여 뒤꿈치관통구(136d)를 통해 돌출되어 대상 환자의 발 뒤꿈치를 감싸는 형태로 가압하는 구조의 제4팽창구동부(137d);를 포함하는 것을 특징으로 하는 슬라이딩 재활로봇 시스템. |