| 번호 | 청구항 |
|---|---|
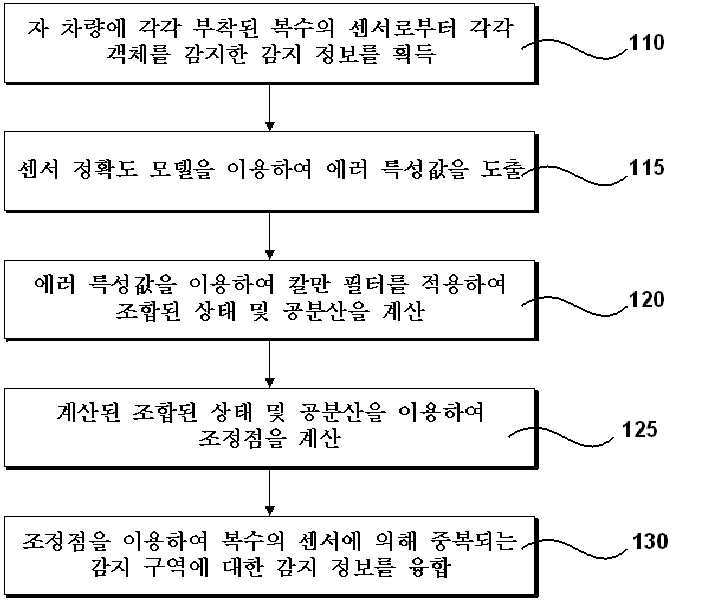
| 1 | (a) 자 차량에 장착된 복수의 센서로부터 감지 정보를 각각 획득하는 단계;(b) 상기 복수의 센서에 의해 서로 다르게 감지된 각각의 감지 정보를 이용하여 하나의 타겟 객체로의 연관을 위한 상기 타겟 객체에 대한 조정점을 결정하는 단계; 및(c) 상기 조정점을 이용하여 복수의 센서의 각각의 감지 정보를 융합하는 단계를 포함하되,상기 (b) 단계 이전에, 센서 정확도 모델을 이용하여 에러 특성값을 도출하는 단계; 및상기 에러 특성값을 이용하여 칼만 필터를 적용하여 조합된 상태 및 공분산을 계산하는 단계를 더 포함하되,상기 조정점은 상기 조합된 상태 및 공분산을 이용하여 계산되는 것을 특징으로 하는 다중 센서 융합 방법. |
| 2 | 삭제 |
| 3 | 제1 항에 있어서, 상기 에러 특성값을 도출하는 단계는, 상기 복수의 센서에 의해 감지 가능한 영역(FOV)을 고려하여 복수의 점유 구역을 구성하는 단계;상기 자 차량의 센서의 장착 위치 및 상기 타겟 객체의 기준점, 상기 타겟 객체의 GPS 장착 위치를 이용하여 상기 타겟 객체의 표면상으로 보간된 센서 및 GPS 위치를 결정하는 단계;상기 보간된 센서 및 GPS 위치를 이용하여 종축 오차 및 횡축 오차를 계산하는 단계; 및상기 각각의 점유 구역에서 상기 종축 오차 및 횡축 오차의 평균값이 제로(0)가 되도록 에러 특성값을 도출하는 단계를 포함하는 다중 센서 융합 방법. |
| 4 | 제3 항에 있어서, 상기 조합된 상태 및 공분산을 계산하는 단계는, 상기 복수의 점유 구역 중 상기 자 차량에 영향을 미치는 적어도 4개의 점유 구역을 선택하여 상기 조합된 상태 및 공분산을 계산하는 것을 특징으로 하는 다중 센서 융합 방법. |
| 5 | 제1 항에 있어서, 상기 (b) 단계는, 상기 조합된 상태 및 공분산을 이용한 Mahalanobis 거리를 계산하고, 상기 계산된 Mahalanobis 거리가 최소인 거리를 이용하여 상기 조정점을 계산하는 것을 특징으로 하는 다중 센서 융합 방법. |
| 6 | 제1 항에 있어서, 상기 (c) 단계는, 타겟 객체 표면에서 적어도 두개의 보간된 센서 위치와 조정점 사이의 거리를 계산하는 단계;상기 계산된 거리를 이용하여 상기 감지 정보를 융합하는 단계를 포함하는 다중 센서 융합 방법. |
| 7 | 제1 항, 제3항 내지 제6 항 중 어느 하나의 항에 따른 방법을 수행하기 위한 프로그램 코드를 기록한 컴퓨터로 판독 가능한 기록매체 제품. |
| 8 | 자 차량에 장착된 복수의 센서로부터 감지 정보를 각각 획득하는 획득부;상기 복수의 센서에 의해 서로 다르게 감지된 각각의 감지 정보를 이용하여 하나의 타겟 객체로의 연관을 위한 상기 타겟 객체에 대한 조정점을 결정하는 조정부; 및상기 조정점을 이용하여 복수의 센서의 각각의 감지 정보를 융합하는 융합부를 포함하되,상기 조정부는, 센서 정확도 모델을 이용하여 에러 특성값을 도출하고, 상기 에러 특성값을 이용하여 칼만 필터를 적용하여 조합된 상태 및 공분산을 계산하되, 상기 조정점은 상기 조합된 상태 및 공분산을 이용하여 계산되는 것을 특징으로 하는 다중 센서 융합 장치. |
| 9 | 삭제 |
| 10 | 제8 항에 있어서, 상기 조정부는, 상기 복수의 센서에 의해 감지 가능한 영역(FOV)을 고려하여 복수의 점유 구역을 구성하며, 상기 자 차량의 센서의 장착 위치 및 상기 타겟 객체의 기준점, 상기 타겟 객체의 GPS 장착 위치를 이용하여 상기 타겟 객체의 표면상으로 보간된 센서 및 GPS 위치를 결정하고, 상기 보간된 센서 및 GPS 위치를 이용하여 종축 오차 및 횡축 오차를 계산하며, 상기 각각의 점유 구역에서 상기 종축 오차 및 횡축 오차의 평균값이 제로(0)가 되도록 에러 특성값을 도출하는 것을 특징으로 하는 다중 센서 융합 장치. |
| 11 | 제10 항에 있어서, 상기 조정부는, 상기 복수의 점유 구역 중 상기 자 차량에 영향을 미치는 적어도 4개의 점유 구역을 선택하여 상기 조합된 상태 및 공분산을 계산하는 것을 특징으로 하는 다중 센서 융합 장치. |
| 12 | 제8 항에 있어서, 상기 조정부는, 상기 조합된 상태 및 공분산을 이용한 Mahalanobis 거리를 계산하고, 상기 계산된 Mahalanobis 거리가 최소인 거리를 이용하여 상기 조정점을 계산하는 것을 특징으로 하는 다중 센서 융합 장치. |
| 13 | 제8 항에 있어서, 상기 융합부는, 타겟 객체 표면에서 적어도 두개의 보간된 센서 위치와 조정점 사이의 거리를 계산하고, 상기 계산된 거리를 이용하여 상기 감지 정보를 융합하는 것을 특징으로 하는 다중 센서 융합 장치. |
| 14 | 자 차량에 장착된 복수의 센서; 및상기 복수의 센서에 의해 획득된 각각의 감지 정보를 이용하여 하나의 타겟 객체로의 연관을 고려하여 상기 타겟 객체에 대한 조정점을 결정한 후 상기 조정점을 이용하여 복수의 센서의 각각의 감지 정보를 융합하는 다중 센서 융합부를 포함하되,상기 다중 센서 융합부는, 센서 정확도 모델을 이용하여 에러 특성값을 도출하고, 상기 에러 특성값을 이용하여 칼만 필터를 적용하여 조합된 상태 및 공분산을 계산하되, 상기 조정점은 상기 조합된 상태 및 공분산을 이용하여 계산되는 것을 특징으로 하는 차량. |