| 번호 | 청구항 |
|---|---|
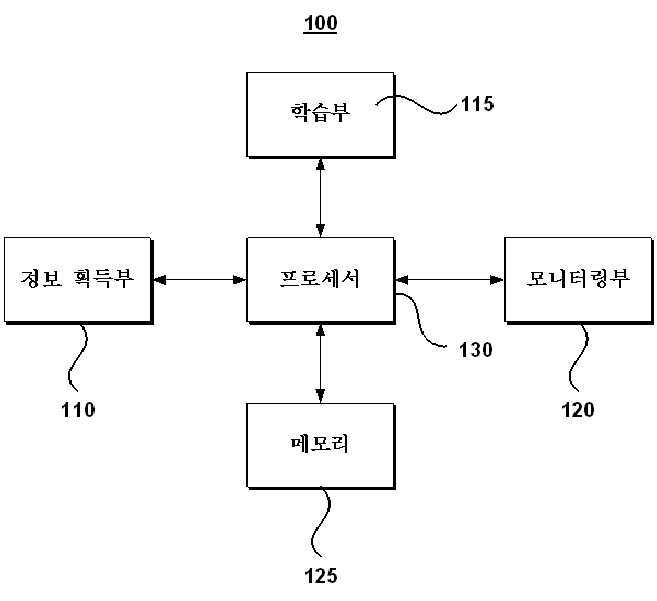
| 1 | 차량 주행 환경에 관련된 데이터 셋(data set)을 획득하는 정보 획득부-상기 데이터 셋은 좌우차선의 클로소이드(clothoid) 곡선 계수 평균값, 종횡방향 속도 및 요 각속도(yaw rate)를 포함함;상기 데이터 셋을 LSTM(long short term memory) 기반 조향 행동 예측 모델에 입력한 후 상기 데이터 셋에 상응하는 조향각을 매핑하여 상기 조향 행동 예측 모델을 학습하는 학습부-상기 조향 행동 예측 모델은 상기 데이터 셋을 기반으로 예측된 조향각이 실제 조향각에 수렴하도록 학습됨;T 시점의 데이터 셋을 상기 학습된 조향 행동 예측 모델에 입력하여 상기 T 시점 이전의 장기 상태 벡터 및 단기 상태 벡터를 참조하여 차선 유지를 위한 (T+1) 시점의 조향각을 예측하는 예측부; 및상기 예측된 조향각과 차량 조작에 의해 획득되는 실제 조향각을 비교하여 조향 행동을 모니터링한 후 조향 행동 이상 검출시 경고 메시지를 출력하는 모니터링부를 포함하는 조향 행동 모니터링 장치. |
| 2 | 제1 항에 있어서, 상기 조향 행동 예측 모델은,시계열로 데이터 셋을 입력받는 입력층(input layer);이전 시점의 장기 상태 벡터 및 단기 상태 벡터를 고려하여 상기 데이터 셋을 기반으로 조향각을 예측하는 은닉층(hidden layer); 및상기 예측된 조향각을 출력하는 출력층(output layer)을 포함하되,상기 은닉층은 멀티 레이어로 구성되되, 상기 멀티 레이어를 구성하는 각 레이어는 LSTM으로 연결되는 것을 특징으로 하는 조향 행동 모니터링 장치. |
| 3 | 제2 항에 있어서, 상기 은닉층은 시계열 순서에 따른 데이터 셋을 고려할 수 있도록 각 단계가 LSTM으로 연결되는 것을 특징으로 하는 조향 행동 모니터링 장치. |
| 4 | 제1 항에 있어서, 상기 LSTM은, 데이터 셋과 이전 시점의 단기 상태 벡터(short term state)를 입력받는 4개의 완전 연결층(fully-connected layer);상기 데이터 셋과 상기 이전 시점의 단기 상태 벡터를 이용하여 이전 시점의 장기 상태 벡터의 적어도 일부의 삭제 여부를 결정하는 삭제 게이트;상기 데이터 셋과 상기 이전 시점의 상태 벡터를 이용하여 쌍곡선 탄젠트 활성화 함수 연산을 통해 계산된 후보 은닉 상태의 출력 상태를 결정하는 입력 게이트;상기 후보 은닉 상태의 출력 상태와 상기 삭제 게이트에 의해 출력된 상기 이전 시점의 장기 상태 벡터를 이용하여 현재 시점의 장기 상태 벡터를 결정하여 저장하는 장기 상태 저장부; 및상기 데이터 셋과 상기 이전 시점의 단기 상태 벡터를 이용하여 상기 현재 시점의 장기 상태 벡터의 출력 상태를 최종 결정하는 출력 게이트를 포함하는 것을 특징으로 하는 조향 행동 모니터링 장치. |
| 5 | 삭제 |
| 6 | 삭제 |
| 7 | 차량 주행 환경에 관련된 데이터 셋(data set)을 획득하는 단계-상기 데이터 셋은 좌우차선의 클로소이드(clothoid) 곡선 계수 평균값, 종횡방향 속도 및 요 각속도(yaw rate)를 포함함;상기 데이터 셋을 LSTM(long short term memory) 기반 조향 행동 예측 모델에 입력한 후 상기 데이터 셋에 상응하는 조향각을 매핑하여 상기 조향 행동 예측 모델을 학습하는 단계-상기 조향 행동 예측 모델은 상기 데이터 셋을 기반으로 예측된 조향각이 실제 조향각에 수렴하도록 학습됨;T 시점의 데이터 셋을 상기 학습된 조향 행동 예측 모델에 입력하여 상기 T 시점 이전의 장기 상태 벡터 및 단기 상태 벡터를 참조하여 차선 유지를 위한 (T+1) 시점의 조향각을 예측하는 단계;상기 예측된 조향각과 차량 조작에 의해 획득되는 실제 조향각을 비교하여 조향 행동을 모니터링하는 단계; 및상기 모니터링 결과 운전자의 잘못된 조향 행동이 검출되면 경고 메시지를 출력하는 단계를 포함하는 조향 행동 모니터링 방법. |
| 8 | 삭제 |
| 9 | 삭제 |
| 10 | 제7 항에 따른 방법을 수행하기 위한 프로그램 코드를 기록한 컴퓨터로 판독 가능한 기록매체 제품. |