| 번호 | 청구항 |
|---|---|
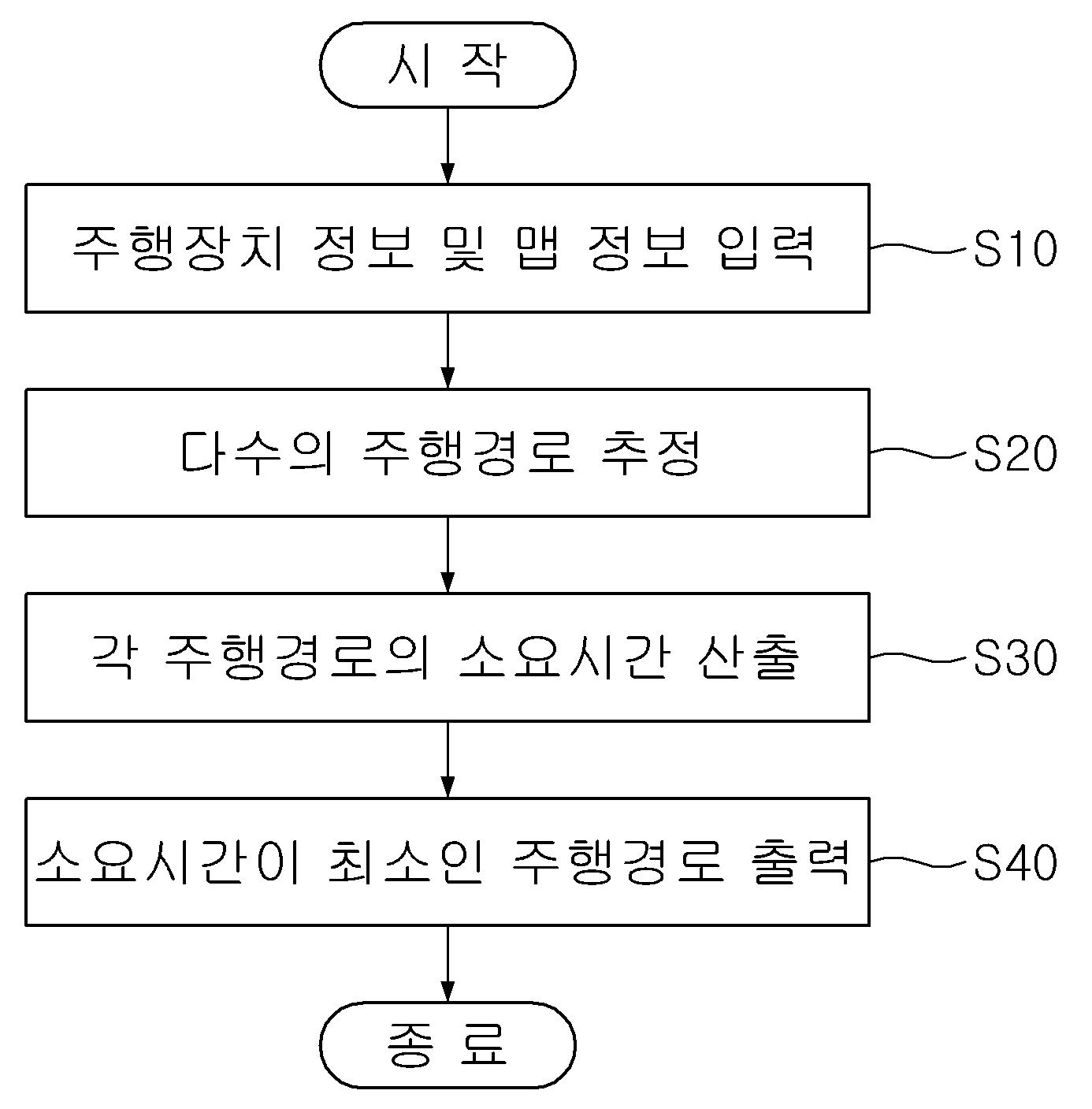
| 1 | 입력부가 무한궤도형 주행장치의 주행속도 및 방향전환 소요시간과, 평면상에서의 장애물 위치정보와, 출발점 및 도착점 위치정보를 입력받는 제1 단계;제어부가 상기 출발점부터 상기 도착점까지의 다수의 주행경로를 추정하는 제2 단계;상기 제어부가 상기 제2 단계에서 추정된 각각의 주행경로별 소요시간을 산출하는 제3 단계;출력부가 소요시간이 최소인 주행경로를 출력하는 제4 단계;를 포함하되,상기 방향전환 소요시간은, 기준치 이상의 속도로 주행 중이던 무한궤도형 주행장치가 완전히 정지될 때까지 소요되는 시간과, 무한궤도형 주행장치의 주행방향을 변환하는데 소요되는 시간과, 정지해 있던 무한궤도형 주행장치의 주행속도가 기준치에 이를 때까지 소요되는 시간을 합하여 산출되는 것을 특징으로 하는 무한궤도형 주행장치 주행경로 제공방법. |
| 2 | 삭제 |
| 3 | 제1항에 있어서,상기 무한궤도형 주행장치는 직선주행 및 제자리에서의 방향전환이 가능한 것을 특징으로 하는 무한궤도형 주행장치 주행경로 제공방법. |
| 4 | 제3항에 있어서,주행경로를 나타내는 맵은 바둑판 패턴으로 배열된 다수 개의 사각형 셀로 구분되며, 상기 무한궤도형 주행장치는 제자리에서 45도 회전 및 90도 회전만 가능한 것을 특징으로 하는 무한궤도형 주행장치 주행경로 제공방법. |
| 5 | 입력부가 무한궤도형 주행장치의 주행속도 및 방향전환 소요시간과, 평면상에서의 장애물 위치정보와, 출발점 및 도착점 위치정보를 입력받는 제1 단계;제어부가 상기 출발점부터 상기 도착점까지의 다수의 주행경로를 추정하는 제2 단계;상기 제어부가 상기 제2 단계에서 추정된 각각의 주행경로별 소요시간을 산출하는 제3 단계;출력부가 소요시간이 최소인 주행경로를 출력하는 제4 단계;를 포함하되,상기 제2 단계는 상기 출발점부터 상기 도착점까지의 방향전환 횟수가 최소인 패턴에 기초하여 다수의 주행경로를 추정하도록 구성되는 것을 특징으로 하는 무한궤도형 주행장치 주행경로 제공방법. |
| 6 | 제1항에 있어서,주행경로를 나타내는 맵은 다수 개의 셀로 구분되며,상기 제1 단계는, 사용자가 하나 이상의 셀을 선택하였을 때, 상기 입력부는 선택된 셀을 장애물이 위치한 지점으로 인식하도록 구성되는 것을 특징으로 하는 무한궤도형 주행장치 주행경로 제공방법. |
| 7 | 제1항에 있어서,주행경로를 나타내는 맵은 다수 개의 셀로 구분되며,상기 제1 단계는, 사용자가 두 개의 셀을 선택하였을 때, 상기 입력부는 어느 하나의 셀을 출발점으로 인식하고 다른 하나의 셀을 도착점으로 인식하도록 구성되는 것을 특징으로 하는 무한궤도형 주행장치 주행경로 제공방법. |