| 번호 | 청구항 |
|---|---|
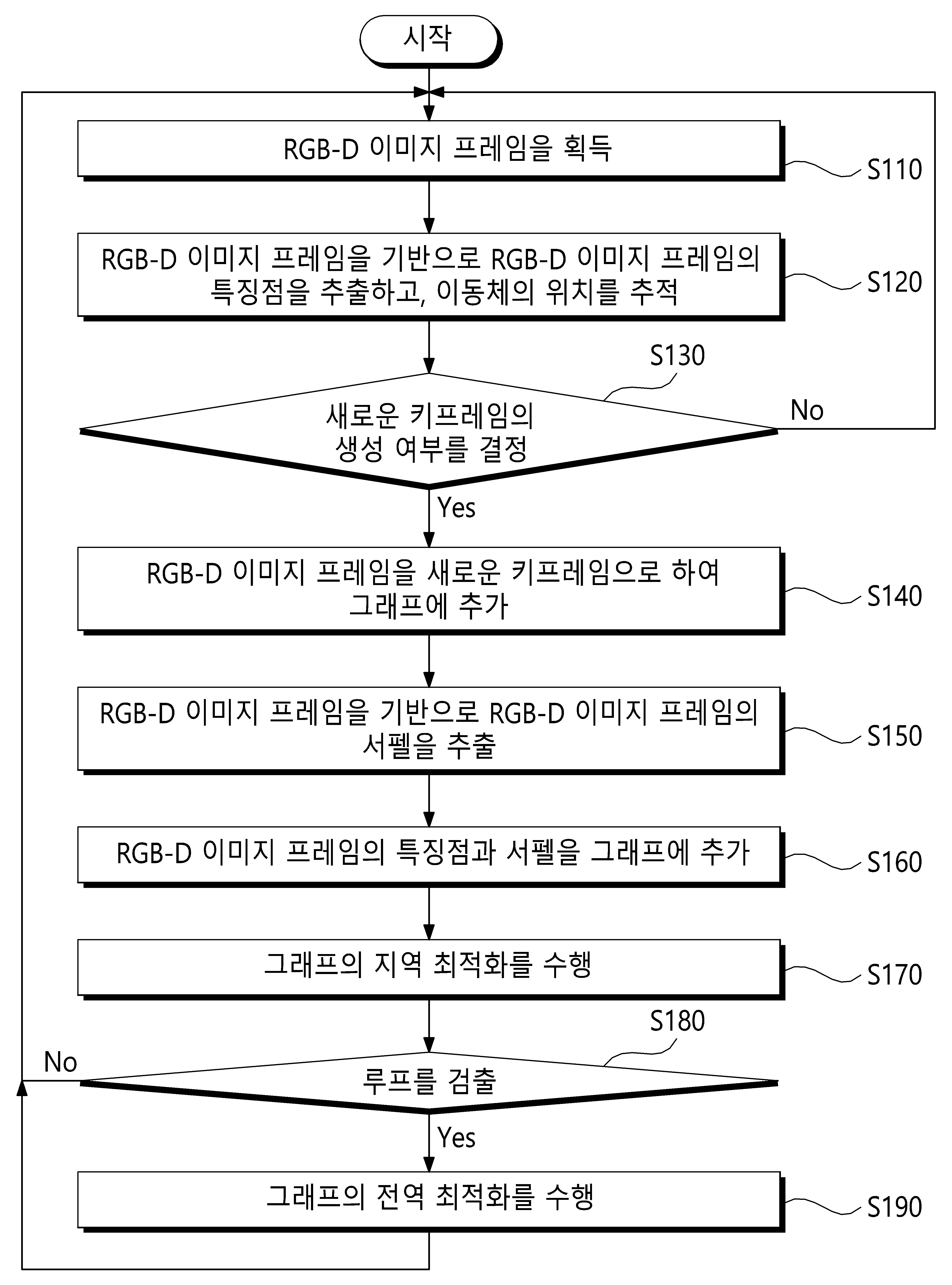
| 1 | 이동체에 장착된 RGB-D 센서를 통해 RGB-D 이미지 프레임을 획득하는 단계;상기 RGB-D 이미지 프레임을 기반으로 상기 RGB-D 이미지 프레임의 특징점(point feature)을 추출하고, 상기 이동체의 위치를 추적하는 단계;추적한 상기 이동체의 위치를 기반으로 새로운 키프레임(keyframe)의 생성 여부를 결정하는 단계;상기 새로운 키프레임을 생성하는 것으로 결정되면, 상기 RGB-D 이미지 프레임을 상기 새로운 키프레임으로 하여 그래프에 추가하는 단계;상기 RGB-D 이미지 프레임을 기반으로 상기 RGB-D 이미지 프레임의 서펠(surface element, surfel)을 추출하는 단계; 상기 RGB-D 이미지 프레임의 특징점 중에서 기존 특징점 랜드마크와 매칭되지 않은 특징점을 새로운 특징점 랜드마크로 하여 상기 그래프에 추가하고, 상기 RGB-D 이미지 프레임의 서펠 중에서 기존 서펠 랜드마크와 매칭되지 않은 서펠을 새로운 서펠 랜드마크로 하여 상기 그래프에 추가하는 단계; 및상기 추가된 특징점 랜드마크와 상기 추가된 서펠 랜드마크를 이용하여, 상기 그래프의 지역 최적화를 수행하는 단계로서, 여기서 상기 지역 최적화는 상기 추가된 특징점 랜드마크 및 서펠 랜드마크와 관련되는 키프레임에 해당하는 범위에서 수행하는 단계를 포함하는 특징점-서펠 융합을 이용한 이동체의 위치 추정 및 지도 작성 방법. |
| 2 | 제1항에서,상기 서펠 추출 단계는,상기 RGB-D 이미지 프레임을 기반으로 획득한 수퍼픽셀(superpixel)을 이용하여 서펠 후보를 생성하고, 수퍼픽셀에 속한 픽셀들의 깊이 정보를 이용하여 서펠 후보 중에서 상기 RGB-D 이미지 프레임의 서펠을 추출하며,서펠의 위치를 이용하여 상기 RGB-D 이미지 프레임의 서펠과 상기 기존 서펠 랜드마크와의 연관을 수행하는 것을 포함하는,특징점-서펠 융합을 이용한 이동체의 위치 추정 및 지도 작성 방법. |
| 3 | 제2항에서,상기 서펠 추출 단계는,수퍼픽셀에 속한 모든 픽셀에 대해 서펠과의 거리를 획득하고, 획득한 거리의 합이 미리 설정된 임계값보다 작은 서펠을 서펠 후보 중에서 추출하여 상기 RGB-D 이미지 프레임의 서펠을 획득하며,상기 RGB-D 이미지 프레임의 서펠의 중심점과 상기 기존 서펠 랜드마크의 중심점 사이의 거리, 상기 RGB-D 이미지 프레임의 서펠의 중심점과 상기 기존 서펠 랜드마크 간의 수직 거리와 상기 기존 서펠 랜드마크의 중심점과 상기 RGB-D 이미지 프레임의 서펠 간의 수직 거리의 평균값, 상기 RGB-D 이미지 프레임의 서펠의 반지름 및 상기 기존 서펠 랜드마크의 반지름을 기반으로 상기 RGB-D 이미지 프레임의 서펠과 상기 기존 서펠 랜드마크와의 연관을 수행하는 것을 포함하는,특징점-서펠 융합을 이용한 이동체의 위치 추정 및 지도 작성 방법. |
| 4 | 제1항에서,상기 새로운 키프레임으로 상기 그래프에 추가된 상기 RGB-D 이미지 프레임의 특징점과 서펠을 기반으로 루프를 검출하고, 상기 루프가 검출되면 상기 루프에 대한 정보를 상기 그래프에 추가하는 단계; 및상기 루프가 검출되면, 전체 키프레임을 대상으로 상기 그래프의 전역 최적화를 수행하는 단계;를 더 포함하는 특징점-서펠 융합을 이용한 이동체의 위치 추정 및 지도 작성 방법. |
| 5 | 제4항에서,상기 루프 검출 단계는,상기 새로운 키프레임으로 상기 그래프에 추가된 상기 RGB-D 이미지 프레임의 특징점에 대한 기술자를 이용하여 이전 키프레임 중에서 프레임 후보를 획득하고, 상기 새로운 키프레임으로 상기 그래프에 추가된 상기 RGB-D 이미지 프레임의 서펠과 상기 프레임 후보의 서펠을 기반으로 상기 루프를 검출하는 것을 포함하는,특징점-서펠 융합을 이용한 이동체의 위치 추정 및 지도 작성 방법. |