| 번호 | 청구항 |
|---|---|
| 1 | 보행 로봇의 위치추정 방법으로서,상기 보행 로봇이 이동하는 동안 상기 보행 로봇에 장착된 관성측정장치(IMU; Inertial Measurement Units)에서 측정된 데이터와 운동 역학을 고려한 보행 로봇의 키네마틱 인자(Kinematic factor)를 산출하는 단계;상기 보행 로봇에 장착된 라이다 센서를 이용하여 상기 보행 로봇이 위치하는 공간에 대한 포인트 클라우드 데이터를 획득하는 단계;상기 보행 로봇에 장착된 이미지 센서를 이용하여 상기 보행 로봇이 위치하는 공간에 대한 이미지 데이터를 획득하는 단계;상기 키네마틱 인자와, 상기 포인트 클라우드 데이터, 및 상기 이미지 데이터를 융합하는 데이터 융합 단계; 및융합된 상기 데이터를 기초로 상기 보행 로봇의 위치추정 단계;를 포함하는 것인, 보행 로봇의 위치추정 방법. |
| 2 | 제1항에 있어서,상기 키네마틱 인자는, 상기 관성측정장치와 함께 상기 로봇에 장착된 관절 센서 데이터를 기초로, 상기 보행 로봇의 다리 및 발에 대한 위치와 속도를 산출하는 것인, 보행 로봇의 위치추정 방법. |
| 3 | 제2항에 있어서,상기 보행 로봇의 다리 및 발에 대한 위치와 속도는, 이전 시간의 상기 보행 로봇의 다리와 발의 위치로부터 현재 시간의 상기 보행 로봇의 다리와 발의 위치까지 사전적분(pre-integration)을 통해 산출되는 것인, 보행 로봇의 위치추정 방법. |
| 4 | 제3항에 있어서,상기 보행 로봇의 다리 및 발에 대한 위치와 속도는, 상기 보행 로봇의 관성측정장치에서 측정된 데이터를 기초로 추정된 몸체 속도를 기초로 발 속도의 불확실성(uncertainty)을 산출하고, 상기 사전적분의 계산 결과와 상기 불확실성에 대한 수치를 함께 고려하여 산출되는 것인, 보행 로봇의 위치추정 방법. |
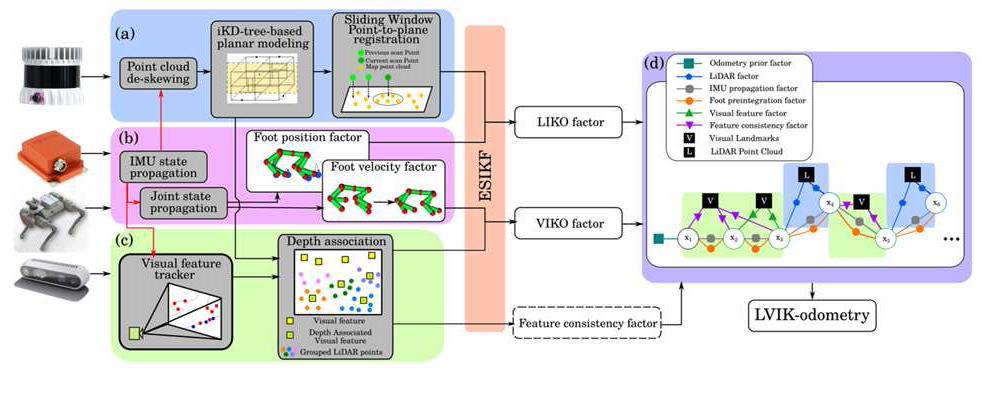
| 5 | 제1항에 있어서,상기 라이다 센서의 포인트 클라우드 데이터로부터, 슬라이딩 윈도우 포인트 클라우드 최적화(sliding-window point cloud optimization)를 사용하여 특징점 데이터를 생성하는 단계;를 더 포함하는 것인, 보행 로봇의 위치추정 방법. |
| 6 | 제5항에 있어서,상기 이미지 센서로부터의 이미지 데이터를 기초로 패스트 코너(Fast corner) 탐지 및 KLT(Kanade-Lucas-Tomasi) 기반 광학 흐름(optical flow) 추정을 통해 상기 이미지의 특징점을 추출하는 단계;를 더 포함하는 것인, 보행 로봇의 위치추정 방법. |
| 7 | 제6항에 있어서,상기 데이터 융합 단계는.상기 키네마틱 인자와 상기 라이다 센서의 포인트 클라우드 데이터로부터의 상기 특징점 데이터를 융합하여 라이다-관성-키네마틱 오도메트리(LIKO; LiDAR-Inertial-Kinematic Odometry) 인자를 산출하는 단계; 및 상기 키네마틱 인자와 상기 이미지 센서의 이미지 데이터로부터의 상기 특징점 데이터를 융합하여 시각-관성-키네마틱-오도메트리(VIKO; Visual-Inertial-Kinematic Odometry) 인자를 산출하는 단계;를 포함하고,상기 보행 로봇의 위치추정 단계는, 상기 LIKO 인자와 상기 VIKO 인자를 융합하여 상기 보행 로봇의 위치를 추정하는 것인, 보행 로봇의 위치추정 방법.. |
| 8 | 제7항에 있어서,슈퍼 픽셀(super pixel) 알고리즘을 기초로 상기 이미지 데이터에 대한 픽셀 단위의 분류 이미지를 생성하고,상기 픽셀 단위의 분류 이미지 데이터와, 상기 라이다 센서로부터의 포인트 클라우드 데이터를 상기 이미지 데이터의 이미지 프레임의 범위로 투영한 데이터를 기초로, 상기 이미지 데이터의 상기 특징점의 깊이 정보를 보정한, 특징점 일관성 인자를 산출하며,상기 특징점 일관성 인자를 추가로 고려하여, 상기 보행 로봇의 위치를 추정하는 것인, 보행 로봇의 위치추정 방법. |
| 9 | 이미지 센서;관성측정장치(IMU);라이다 센서;컴퓨터 판독 가능한 적어도 하나의 명령어를 포함하는 메모리; 및상기 명령어를 처리함으로써 보행 로봇의 위치추정을 수행하는 프로세서;를 포함하는 보행 로봇으로서,상기 프로세서는,상기 보행 로봇이 이동하는 동안 상기 보행 로봇에 장착된 관성측정장치에서 측정된 데이터와 운동 역학을 고려한 보행 로봇의 키네마틱 인자(Kinematic factor)를 산출하고, 상기 보행 로봇에 장착된 라이다 센서를 이용하여 상기 보행 로봇이 위치하는 공간에 대한 포인트 클라우드 데이터를 획득하며, 상기 보행 로봇에 장착된 이미지 센서를 이용하여 상기 보행 로봇이 위치하는 공간에 대한 이미지 데이터를 획득하고, 상기 키네마틱 인자와, 상기 포인트 클라우드 데이터, 및 상기 이미지 데이터를 융합하고, 융합된 상기 데이터를 기초로 상기 보행 로봇의 위치를 추정하는 것인, 보행 로봇. |
| 10 | 제9항에 있어서,상기 키네마틱 인자는, 상기 관성측정장치와 함께 상기 로봇에 장착된 관절 센서 데이터를 기초로, 상기 보행 로봇의 다리 및 발에 대한 위치와 속도를 산출하는 것인, 보행 로봇. |
| 11 | 제10항에 있어서,상기 보행 로봇의 다리 및 발에 대한 위치와 속도는, 이전 시간의 상기 보행 로봇의 다리와 발의 위치로부터 현재 시간의 상기 보행 로봇의 다리와 발의 위치까지 사전적분을 통해 산출되는 것인, 보행 로봇. |
| 12 | 제11항에 있어서,상기 보행 로봇의 다리 및 발에 대한 위치와 속도는, 상기 보행 로봇의 관성측정장치에서 측정된 데이터를 기초로 추정된 몸체 속도를 기초로 발 속도의 불확실성을 산출하고, 상기 사전적분의 계산 결과와 상기 불확실성에 대한 수치를 함께 고려하여 산출되는 것인, 보행 로봇. |
| 13 | 제9항에 있어서,상기 프로세서는,상기 라이다 센서의 포인트 클라우드 데이터로부터, 슬라이딩 윈도우 포인트 클라우드 최적화를 사용하여 특징점 데이터를 생성하는 것인, 보행 로봇. |
| 14 | 제13항에 있어서, 상기 프로세서는,상기 이미지 센서로부터의 이미지 데이터를 기초로 패스트 코너(Fast corner) 탐지 및 KLT(Kanade-Lucas-Tomasi) 기반 광학 흐름(optical flow) 추정을 통해 상기 이미지의 특징점을 추출하는 것인, 보행 로봇. |
| 15 | 제14항에 있어서,상기 프로세서는,상기 키네마틱 인자와 상기 라이다 센서의 포인트 클라우드 데이터로부터의 상기 특징점 데이터를 융합하여 라이다-관성-키네마틱 오도메트리(LIKO; LiDAR-Inertial-Kinematic Odometry) 인자를 산출하고,상기 키네마틱 인자와 상기 이미지 센서의 이미지 데이터로부터의 상기 특징점 데이터를 융합하여 시각-관성-키네마틱-오도메트리(VIKO; Visual-Inertial-Kinematic Odometry) 인자를 산출하며,상기 LIKO 인자와 상기 VIKO 인자를 융합하여 상기 보행 로봇의 위치를 추정하는 것인, 보행 로봇. |
| 16 | 제15항에 있어서,상기 프로세서는,슈퍼 픽셀 알고리즘을 기초로 상기 이미지 데이터에 대한 픽셀 단위의 분류 이미지를 생성하고,상기 픽셀 단위의 분류 이미지 데이터와, 상기 라이다 센서로부터의 포인트 클라우드 데이터를 상기 이미지 데이터의 이미지 프레임의 범위로 투영한 데이터를 기초로, 상기 이미지 데이터의 상기 특징점의 깊이 정보를 보정한, 특징점 일관성 인자를 산출하며,상기 특징점 일관성 인자를 추가로 고려하여, 상기 보행 로봇의 위치를 추정하는 것인, 보행 로봇. |
| 17 | 비일시적 컴퓨터 판독 가능 저장 매체로서,컴퓨터 판독 가능 명령어들을 저장하도록 구성되는 매체를 포함하고,상기 컴퓨터 판독 가능 명령어들은 프로세서에 의해 실행되는 경우 상기 프로세서가,보행 로봇이 이동하는 동안 상기 보행 로봇에 장착된 관성측정장치(IMU; Inertial Measurement Units)에서 측정된 데이터와 운동 역학을 고려한 보행 로봇의 키네마틱 인자(Kinematic factor)를 산출하는 단계;상기 보행 로봇에 장착된 라이다 센서를 이용하여 상기 보행 로봇이 위치하는 공간에 대한 포인트 클라우드 데이터를 획득하는 단계;상기 보행 로봇에 장착된 이미지 센서를 이용하여 상기 보행 로봇이 위치하는 공간에 대한 이미지 데이터를 획득하는 단계;상기 키네마틱 인자와, 상기 포인트 클라우드 데이터, 및 상기 이미지 데이터를 융합하는 데이터 융합 단계; 및융합된 상기 데이터를 기초로 상기 보행 로봇의 위치추정 단계;를 포함하는 보행 로봇의 위치 추정 방법을 수행하도록 하는, 비일시적 컴퓨터 판독 가능 저장 매체. |