| 번호 | 청구항 |
|---|---|
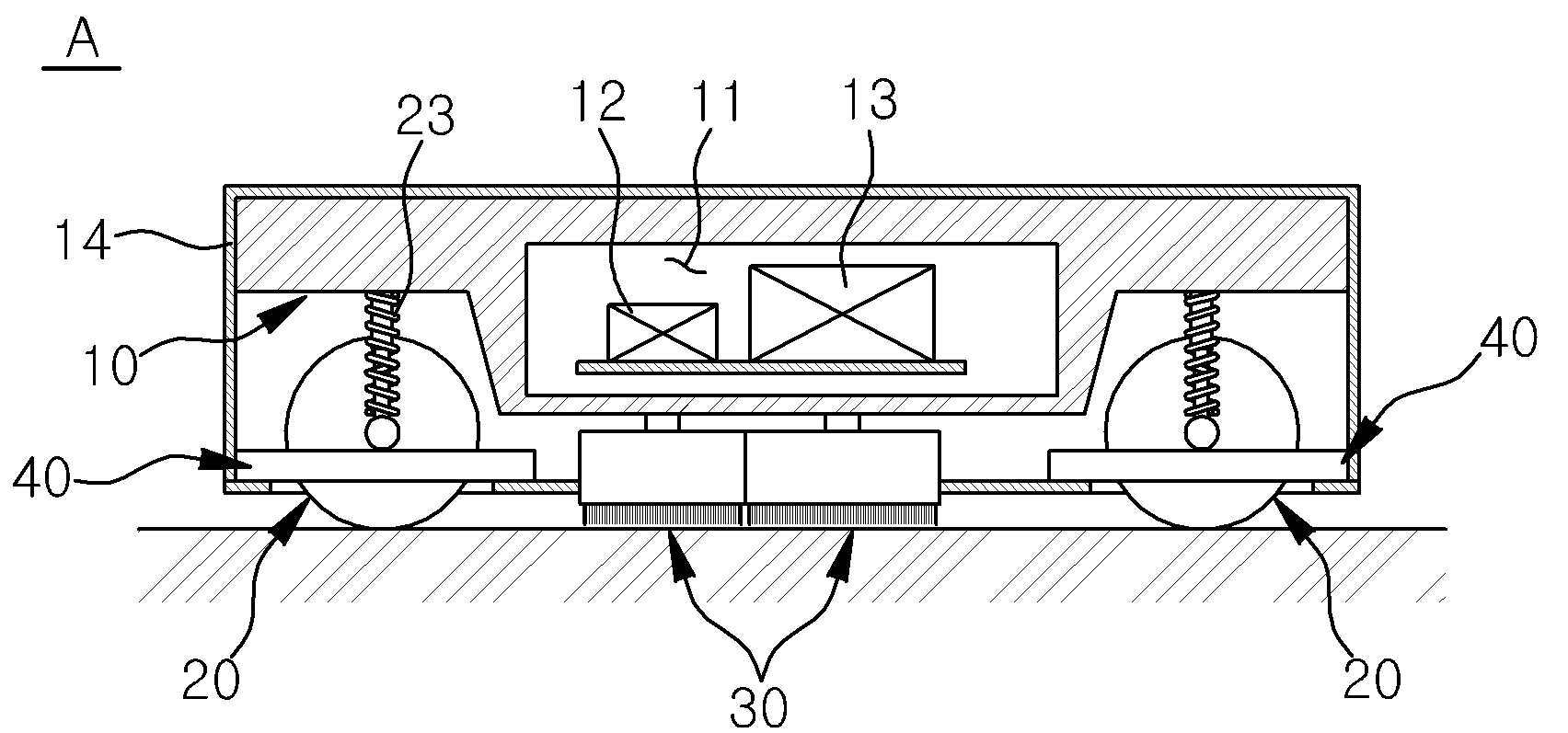
| 1 | 선체 표면에 부착된 생체부착물을 제거하는 선체 청소 로봇에 있어서,수밀공간을 구비하는 본체;상기 본체 하단에 배치되어 모터 구동에 의해 회전하되, 적어도 하나는 조향유닛에 의해 방향이 전환되는 복수 개의 바퀴;상기 본체 저면에 배치되어 모터 구동에 의해 회전하는 복수 개의 브러시; 및상기 본체 저면에 배치되어 자기력을 발휘하는 자성체;를 포함하고,상기 바퀴는, 상기 본체에 승강 가능하게 장착되어 서스펜션에 의한 탄력적 지지에 의해 상기 본체로부터 이격되되, 상기 서스펜션의 가동범위가 조절됨에 따라 상기 본체로부터의 이격 거리가 가변되며,상기 본체는, 상기 수밀공간에 탑재되어 상기 바퀴, 조향유닛 및 브러시로 전원을 공급하는 충전지; 하단으로부터 선체 표면에 이르는 거리를 측정하는 알티미터; 이동중의 속도, 방향, 중력 및 가속도를 측정하는 관성 측정장치; 해당 위치의 수심을 측정하는 압력센서; 및 상기 수밀공간에 탑재되어 상기 바퀴, 조향유닛 및 브러시의 작동을 제어하는 컨트롤러;를 포함하고,상기 바퀴는 이동거리를 측정하는 엔코더를 포함하며,상기 컨트롤러는 상기 관성 측정장치, 상기 압력센서 및 상기 엔코더로부터 생성되는 정보를 획득하여 상기 본체 이동중의 속도, 방향, 중력 및 가속도와, 상기 바퀴 이동거리에 따라 상기 본체를 선체 표면의 좌표계 내에서 선체 길이 방향 또는 폭 방향을 따라 지그 재그 형태로 이동시키는 것을 특징으로 하는 외부 연결선과 사용자 개입 없이 운용 가능한 자율형 선체 청소 로봇. |
| 2 | 삭제 |
| 3 | 삭제 |
| 4 | 삭제 |
| 5 | 제1항에 있어서,상기 바퀴는 상기 본체에 연결되는 프리스매틱 조인트를 포함하는 것을 특징으로 하는 외부 연결선과 사용자 개입 없이 운용 가능한 자율형 선체 청소 로봇. |
| 6 | 제5항에 있어서,상기 프리스매틱 조인트는 상기 서스펜션 상부에 배치되어 엑츄에이터 작동에 의해 출몰하는 스토퍼를 포함하는 것을 특징으로 하는 외부 연결선과 사용자 개입 없이 운용 가능한 자율형 선체 청소 로봇. |
| 7 | 삭제 |
| 8 | 제1항에 있어서,상기 브러시는, 복수의 열로 배치되되, 일 열의 어느 하나 중심은 다른 열의 어느 하나 중심과 어긋나도록 교차 배치되는 것을 특징으로 하는 외부 연결선과 사용자 개입 없이 운용 가능한 자율형 선체 청소 로봇. |