| 번호 | 청구항 |
|---|---|
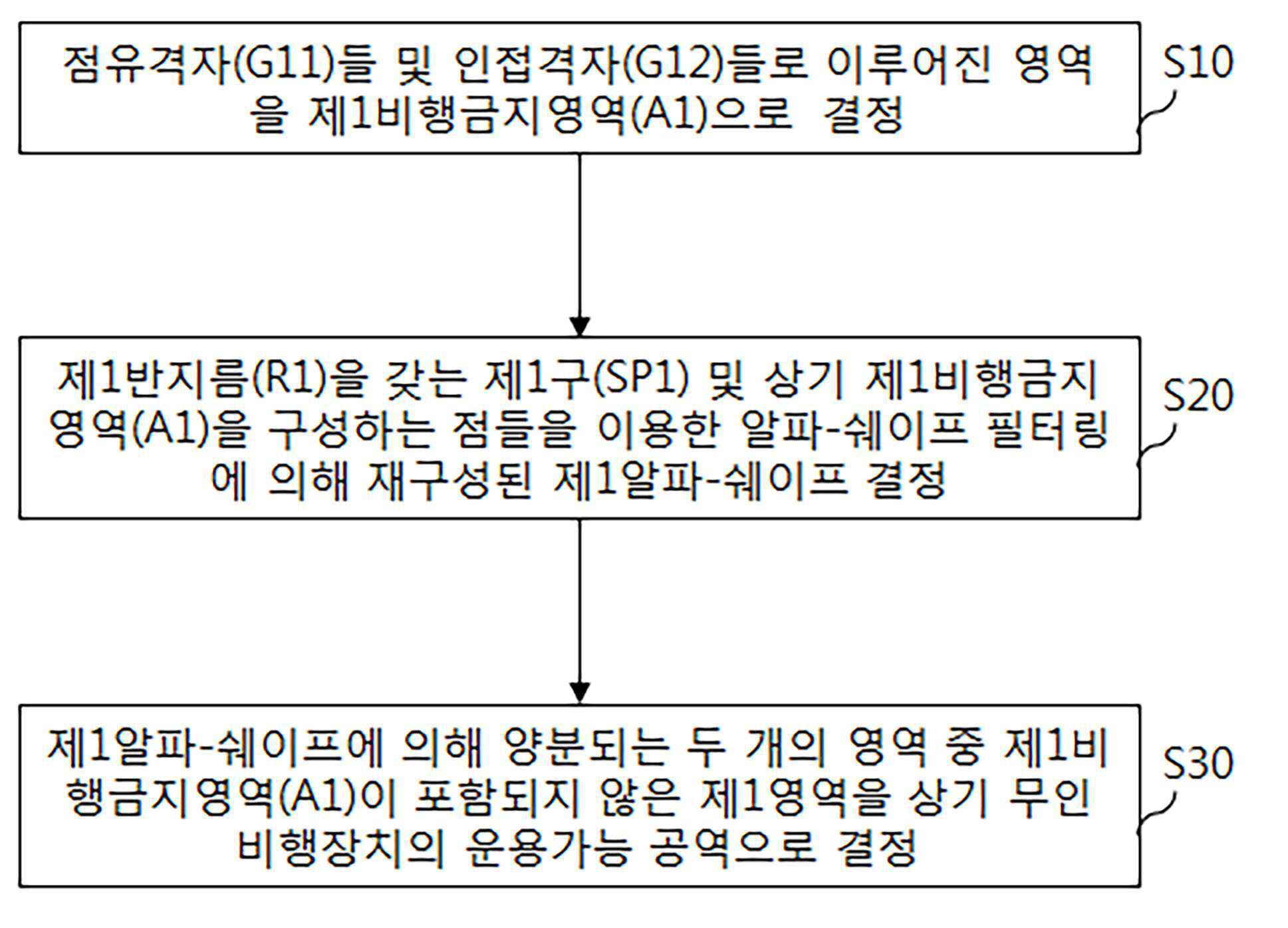
| 1 | 동일한 크기의 격자들로 구분되는 공역에서 무인비행장치의 운용이 허용되는 영역을 결정하는 방법으로서,상기 격자들 중 점유물이 존재하는 격자인 '점유격자'들 및 상기 점유격자들로부터 미리 결정된 거리 내에 존재하는 격자인 '인접격자'들로 이루어진 영역을 제1비행금지영역으로 결정하는 단계; 제1반지름을 갖는 제1구(sphere) 및 상기 제1비행금지영역을 구성하는 점들을 이용한 알파-쉐이프 방법론에 의해 재구성된 쉐이프인 제1알파-쉐이프를 결정하는 단계; 및상기 제1알파-쉐이프에 의해 양분되는 두 개의 영역 중 상기 제1비행금지영역이 포함되지 않은 제1영역을 상기 무인비행장치의 운용가능 공역으로 결정하는 단계;를 포함하며,상기 격자들 중 상기 제1알파-쉐이프의 바운더리에 중첩되는 격자는 상기 운용가능 공역에서 제외되는 것을 특징으로 하는,무인비행장치 운용가능 공역 결정방법. |
| 2 | 삭제 |
| 3 | 제1항에 있어서,상기 점유물은 정적 장애물이며,상기 미리 결정된 거리는 유지거리(keep-out distance)인, 무인비행장치 운용가능 공역 결정방법. |
| 4 | 제1항에 있어서, 상기 제1반지름은 상기 무인비행장치와 상기 무인비행장치가 독점적으로 점유할 수 있는 영역의 경계인 자체경계범위 사이의 거리인, 무인비행장치 운용가능 공역 결정방법. |
| 5 | 제1항에 있어서, 상기 제1반지름의 크기가 클수록 상기 무인비행장치의 운용가능 공역은 줄어들도록 되어 있는, 무인비행장치 운용가능 공역 결정방법. |
| 6 | 제1항에 있어서, 상기 제1비행금지영역을 구성하는 점들은 상기 제1비행금지영역 내에 포함되는 각 격자들인, 무인비행장치 운용가능 공역 결정방법. |
| 7 | 동일한 크기의 격자들로 구분되는 공역에서 무인비행장치의 운용이 허용되는 영역을 산출하는 방법으로서,상기 격자들 중 점유물이 존재하는 격자인 '점유격자'들 및 상기 점유격자들로부터 미리 결정된 거리 내에 존재하는 격자인 '인접격자'들로 이루어진 영역을 제1비행금지영역으로 결정하는 단계; 및제1반지름을 갖는 제1구(sphere) 및 상기 제1비행금지영역을 구성하는 점들을 이용한 알파-쉐이프 방법론에 의해 재구성된 쉐이프인 제1알파-쉐이프를 결정하는 단계;상기 제1알파-쉐이프에 의해 양분되는 두 개의 영역 중 상기 제1비행금지영역이 포함된 제2영역, 및 상기 격자들 중 상기 제1알파-쉐이프의 바운더리에 중첩되는 하나 이상의 격자들을 제외한 영역을 운용가능 공역으로 결정하는 단계;를 포함하며,상기 격자들 중 상기 제1알파-쉐이프의 바운더리에 중첩되는 격자는 상기 운용가능 공역에서 제외되는 것을 특징으로 하는,무인비행장치 운용가능 공역 산출방법. |
| 8 | 제7항에 있어서,상기 점유물은 정적 장애물이며,상기 미리 결정된 거리는 유지거리(keep-out distance)인, 무인비행장치 운용가능 공역 산출방법. |
| 9 | 제7항에 있어서, 상기 제1비행금지영역을 구성하는 점들은 상기 제1비행금지영역 내에 포함되는 각 격자들인, 무인비행장치 운용가능 공역 산출방법. |
| 10 | 제7항에 있어서, 상기 제1반지름의 크기가 클수록 상기 무인비행장치의 운용가능 공역은 줄어들도록 되어 있는, 무인비행장치 운용가능 공역 산출방법. |
| 11 | 동일한 크기의 격자들로 구분되는 공역에서 무인비행장치의 운용이 허용되는 영역을 결정하도록 되어 있는 처리부를 포함하는, 서버로서,상기 처리부는,상기 격자들 중 점유물이 존재하는 격자인 '점유격자'들 및 상기 점유격자들로부터 미리 결정된 거리 내에 존재하는 격자인 '인접격자'들로 이루어진 영역을 제1비행금지영역으로 결정하는 단계; 제1반지름을 갖는 제1구(sphere) 및 상기 제1비행금지영역을 구성하는 점들을 이용한 알파-쉐이프 방법론에 의해 재구성된 쉐이프인 제1알파-쉐이프를 결정하는 단계; 및상기 제1알파-쉐이프에 의해 양분되는 두 개의 영역 중 상기 제1비행금지영역이 포함되지 않은 제1영역을 상기 무인비행장치의 운용가능 공역으로 결정하는 단계;를 수행하도록 되어 있으며,상기 격자들 중 상기 제1알파-쉐이프의 바운더리에 중첩되는 격자는 상기 운용가능 공역에서 제외되는 것을 특징으로 하는,무인비행장치 운용가능 공역 결정서버. |
| 12 | 삭제 |
| 13 | 제11항에 있어서, 상기 제1비행금지영역을 구성하는 점들은 상기 제1비행금지영역 내에 포함되는 각 격자들인, 무인비행장치 운용가능 공역 결정서버. |
| 14 | 동일한 크기의 격자들로 구분되는 공역에서 무인비행장치의 운용이 허용되는 영역을 결정하도록 되어 있는 컴퓨팅 장치로 하여금, 상기 격자들 중 점유물이 존재하는 격자인 '점유격자'들 및 상기 점유격자들로부터 미리 결정된 거리 내에 존재하는 격자인 '인접격자'들로 이루어진 영역을 제1비행금지영역으로 결정하는 단계; 제1반지름을 갖는 제1구(sphere) 및 상기 제1비행금지영역을 구성하는 점들을 이용한 알파-쉐이프 방법론에 의해 재구성된 쉐이프인 제1알파-쉐이프를 결정하는 단계; 및상기 제1알파-쉐이프에 의해 양분되는 두 개의 영역 중 상기 제1비행금지영역이 포함되지 않은 제1영역을 상기 무인비행장치의 운용가능 공역으로 결정하는 단계;를 수행하도록 하는 프로그램코드가 기록되어 있으며,상기 격자들 중 상기 제1알파-쉐이프의 바운더리에 중첩되는 격자는 상기 운용가능 공역에서 제외되는 것을 특징으로 하는,컴퓨터로 읽을 수 있는 논트랜지토리 기록매체. |
| 15 | 삭제 |