| 번호 | 청구항 |
|---|---|
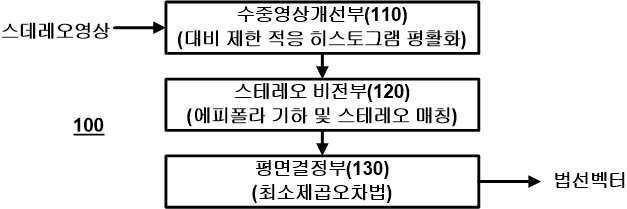
| 1 | 수중 로봇을 이용하여 선체의 수중 검사를 위해 스테레오 카메라를 통해 촬영된 대상평면의 좌측과 우측 이미지를 포함하는 스테레오영상을 입력 받은 후, 밝기 분포를 변화시켜 화질을 개선하는 수중영상개선부(110);상기 화질이 개선된 좌측 및 우측 이미지에 포함되는 카메라 좌표계를 기준으로 한 스테레오 대응점들의 3차원 좌표를 계산하는 스테레오 비전부(120); 및상기 스테레오 비전부(120)에서 얻어진 3차원 좌표들을 이용하여 평면을 결정하고 법선 벡터를 추출하여 출력하는 평면결정부(130);상기 수중영상개선부(110)는,입력된 좌측 및 우측 이미지의 밝기 분포를 변화시킴으로써 화질을 향상시키기 위하여 대비 제한 적응 히스토그램 평활화(Contrast Limited Adaptive Histogram Equalization Method) 기법을 적용하도록 구성되는 스테레오 비전 기반 법선 벡터 추출 장치. |
| 2 | 삭제 |
| 3 | 청구항 1에 있어서, 상기 스테레오 비전부(120)는,수중영상개선부(120)에 의해 화질이 향상된 좌측 및 우측 이미지에 에피폴라 기하(Epipolar geometry) 및 스테레오 매칭을 적용하여, 카메라 좌표계를 기준으로 한 스테레오 대응점들의 3차원 좌표를 계산하도록 구성되며,상기 평면결정부(130)는,스테레오 비전부(120)에 의해 얻어진 3차원 좌표 정보들에 RANSAC(RANdom SAmple Consensus) 기법을 적용하여 이상점들을 제거한 후, 잔여 좌표들을 이용하여 평면을 결정하고, 결정된 평면에 대한 법선을 도출하도록 구성되는 스테레오 비전 기반 법선 벡터 추출 장치. |
| 4 | 삭제 |
| 5 | 수중영상개선부(110)가 스테레오 카메라를 통해 촬영된 대상평면의 좌측과 우측 이미지를 포함하는 스테레오영상을 입력 받은 후, 밝기 분포를 변화시켜 화질을 개선하는 수중 영상 개선 과정(S100);스테레오 비전부(120)가 상기 화질이 개선된 좌측 및 우측 이미지에 포함되는 카메라 좌표계를 기준으로 한 스테레오 대응점들의 3차원 좌표를 계산하는 3차원 좌표 계산 과정(S200); 및평면결정부(130)가 상기 스테레오 비전부(120)에서 얻어진 3차원 좌표들을 이용하여 평면을 결정하고 법선 벡터를 추출하여 출력하는 평면결정과정(S300);상기 수중 영상 개선 과정(S100)은,입력된 좌측 및 우측 이미지의 밝기 분포를 변화시킴으로써 화질을 향상시키기 위하여 대비 제한 적응 히스토그램 평활화(Contrast Limited Adaptive Histogram Equalization Method) 기법을 적용하여 수행되는 스테레오 비전 기반 법선 벡터 추출 방법. |
| 6 | 삭제 |
| 7 | 청구항 5에 있어서, 상기 3차원 좌표 계산 과정(S200)은,수중영상개선부(120)에 의해 화질이 향상된 좌측 및 우측 이미지에 에피폴라 기하(Epipolar geometry) 및 스테레오 매칭을 적용하여, 카메라 좌표계를 기준으로 한 스테레오 대응점들의 3차원 좌표를 계산하는 과정;상기 평면결정과정(S300)은,스테레오 비전부(120)에 의해 얻어진 3차원 좌표 정보들에 RANSAC(RANdom SAmple Consensus) 기법을 적용하여 이상점들을 제거한 후, 잔여 좌표들을 이용하여 평면을 결정하고, 결정된 평면에 대한 법선을 도출하는 과정인 스테레오 비전 기반 법선 벡터 추출 방법. |
| 8 | 삭제 |